



Исследования, проведенные такими учеными как, Добровольский В.В., Колчин Н.И., Решетов Л.Н., показали, что вполне работоспособными, самоустанавливающимися являются механические системы удовлетворяющие формуле подвижности Малышева А.П.
W=6n - 5p5 - 4p4 - 3p3 - 2p2 - p1 (1)
где W – подвижность механизма, n – число подвижных звеньев, pi – число кинематических пар.
Все плоские механизмы, звенья в которых соединены одноподвижными кинематическими парами р5, формуле (1) Малышева А.П. не удовлетворяют и работоспособны лишь принудительно, в них неизбежны избыточные связи.
Известны методы полного и частичного устранения избыточных связей в шарнирных механизмах [1], заключающиеся в адресной замене пар пятого класса p5 парами более высоких классов. В настоящей статье для решения поставленной задачи используется иной метод - метод применения так называемых трексов, т.е. трехзвенных кинематических соединений, сущность которых обоснована в работе [2]. При этом методе цель достигается за счет введения в цепь особых дополнительных звеньев, которые служат единственной цели - увеличить подвижность между соединяемыми звеньями.
Одним из трексов, позволяющих устранить избыточные связи в механизмах является такой (рис.1), в котором между звеньями 1 и 3 устанавливается дополнительное звено 2, образующее со звеном 1 сферическую, а со звеном 3 вращательную кинематические пары.

Рис. 1 - Конструкция трекса
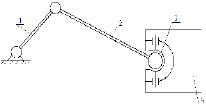
Рис. 2 - Кривошипно-ползунный механизм с трексом
При этом движение звена 1 передается непосредственно на звено 3, т.к. ось вращательной кинематической пары между звеньями 2 и 3 проходит через центр сферической пары звеньев 1 и 2, и поэтому геометрический размер звена 2 никак не влияет на относительное движение звеньев. Если рассмотреть подвижность звена 3 по отношению к звену 1, приняв его за неподвижное, то окажется, что W1 - 3 = 6n - 5p5 - 3p3 = 12 - 5 - 3 =4, т.е. установка описанного трекса в кинематическую цепь соответствует установке четырехподвижной пары второго класса p2.
На рисунке 2 показан кривошипно - ползунный механизм, в котором шатун 2 ползун 4 образуют трекс (рис.1). Этот механизм по формуле (1) имеет подвижность W=1. Причём этот результат можно получить, сосчитав все звенья и пары - n =4, p5 =4, p3 = 1, W = 24 - 20 - 3= 1, или принимая трекс за кинематическую пару p2, тогда n=3, p5=3, W= 18 - 15 - 2= 1.
Отметить, что проблема использования трексов в кинематических цепях ещё не получила должного развития.
Научный руководитель: Дворников Л.Т., д.т.н., профессор