



Введение
Флотация занимает центральное место среди методов обогащения полезных ископаемых благодаря своей универсальности и эффективности. Она применяется для разделения широкого спектра полезных ископаемых: от черных и цветных металлов до неметаллических и редкоземельных элементов [1–3]. Однако при своей широкой распространенности она остается сложным и до сих пор полностью не изученным процессом.
Сложность флотации с точки зрения управления и мониторинга определяется множеством факторов. Во-первых, она характеризуется высокой динамичностью: параметры флотационного процесса, такие как расход пульпы, концентрация реагентов, уровень, свойства сырья, непрерывно изменяются под влиянием различных факторов [4–6]. Во-вторых, взаимодействие между компонентами системы описывается сложными физико-химическими закономерностями, которые трудно формализовать аналитически в рамках обобщенной модели [7]. Данные факты делают флотацию трудным процессом с позиции математического описания, оптимизации и управления [8, 9].
В последние годы в мировом производстве в целом и в горной промышленности в частности активно идет цифровизация [10, 11]. Внедряются системы автоматизированного сбора и анализа технологических данных, разрабатываются алгоритмы машинного обучения для прогнозирования параметров процесса и оптимизации управления [12]. Цифровизация позволяет не только повысить точность контроля, но и сократить потери, снизить экономические затраты и оптимизировать потребление энергии, а также минимизировать влияние человеческого фактора [13].
В этом контексте особое внимание уделяется применению нейронных сетей и других методов искусственного интеллекта для анализа визуальных данных, прогнозирования технологических параметров и автоматического управления процессом флотации.
Однако в настоящее время активное развитие данной сферы привело к созданию большого количества различных типов сетей, что может осложнять подбор подходящей архитектуры, в особенности специалисту, для которого методы машинного обучения не являются основной специализацией. В связи с этим цель исследования – создание рекомендательной схемы, позволяющей упростить выбор архитектуры на основании информации о решаемой задаче.
Материалы и методы исследования
Для достижения поставленной цели был проведен анализ научных публикаций на тему применения технологий глубокого обучения в процессах флотационного обогащения. В работе рассмотрены источники, индексируемые в базах данных ВАК, Scopus и Web of Science, а также материалы отечественных и зарубежных конференций, посвященных цифровизации обогатительных процессов.
Методологическая основа исследования опирается на принципы системного и междисциплинарного анализов. В качестве основного инструмента в работе использован структурированный обзор научных публикаций. Из предварительно отобранных 115 источников в исследовании непосредственно представлены 37. Ввиду активного развития сферы глубокого обучения, возраст большинства источников ограничен пятью годами для обеспечения соответствия добавляемых в схему элементов актуальным разработкам в данной области. Тематика источников включала использование нейронных сетей: как компонентов измерительных средств и систем мониторинга; в качестве сенсоров; как инструментов для оптимизации с использованием моделирования и управления процессом на основе прогностического моделирования. Также дополнительно были изучены источники, в которых раскрываются особенности структурных элементов и архитектурных решений нейросетевых моделей.
Результаты исследования и их обсуждение
Классификация слоев нейронной сети, в зависимости от типа входных данных
Нейронные сети представляют собой мощный инструмент для обработки и анализа данных в задачах, связанных с процессами флотации. Одним из ключевых преимуществ нейронных сетей является их способность работать с разнообразными форматами входных данных: изображениями, временными рядами, табличными данными, спектрами и другими типами информации. Благодаря своей универсальности и гибкости, нейронные сети становятся основой современных систем цифровизации и автоматизации в горной отрасли.
Входные данные для нейронных сетей могут иметь различную природу – числовую, временную, визуальную или смешанную, – и именно их структура во многом определяет выбор архитектуры модели и метод предварительной обработки. Наиболее распространенными в практике флотационного обогащения являются табличные данные и временные ряды, получаемые с датчиков технологического оборудования.
Особое место занимают визуальные данные, например изображения флотационной пены. Для их анализа применяются сверточные нейронные сети, способные выделять пространственные закономерности, такие как распределение пузырьков, текстура и интенсивность бликов, цветовые характеристики пены [14]. Эти признаки не могут быть напрямую измерены классическими датчиками, но содержат ценную информацию о режиме работы процесса.
В отдельный сегмент числовых данных можно выделить временные ряды, где данные связаны с историей изменений параметров. Для их обработки используют рекуррентные нейронные сети, учитывающие зависимость текущего состояния от предыдущих значений. Для работы с временными рядами разработаны различные модификации базовой рекуррентной сети, такие как GRU, LSTM, позволяющие производить фильтрацию исторических значений, сохраняя во внутренней памяти важную информацию и игнорируя ненужную, при этом значительно увеличивая качество прогноза [15–17].
Архитектура нейронной сети в зависимости от решаемой задачи
Регрессионные модели нейронных сетей используются для прогнозирования количественных параметров технологического процесса на основе входных данных различной природы. В контексте флотации такие модели позволяют оценивать будущие значения извлечения, содержания ценных компонентов в концентрате, расхода реагентов или других показателей эффективности. В отличие от классических методов регрессии, нейронные сети способны учитывать сложные нелинейные зависимости между множеством факторов, что позволяет использовать их в качестве так называемых soft-сенсоров, позволяющих вести косвенные измерения параметров, которые не могут быть измерены напрямую, на основе корреляционных зависимостей [18].
Так, нейросетевая архитектура, разработанная для мониторинга производительности флотации в реальном времени, показала способность к устойчивому прогнозированию параметров процесса с высокой точностью [19]. Также на примере углей было показано, что интеграция в качестве исходных данных результатов рентгенофлуоресцентного анализа позволяет повысить точность прогнозирования зольности [20].
Другим примером успешного применения нейронных сетей может служить разработка алгоритма автоматизированного машинного обучения, примененная к данным с обогатительной фабрики [21]. Разработка продемонстрировала ошибку прогнозирования менее 3 % для основных ценных компонентов.
Полезное с точки зрения кинетического описания флотации использование нейронных сетей заключается в прогнозировании параметров, необходимых в модели. Например, нейронная сеть позволяет связать режимные параметры аэрации флотомашины, а также группу гидродинамических критериев подобия с вероятностью столкновения частиц с пузырьком, а также значением извлечения [22].
Для повышения точности прогнозирования также возможно использование в качестве входных данных не просто различных технологических переменных, а их временных рядов, что может быть реализовано с помощью рекуррентных моделей [23].
Классификационные модели нейронных сетей применяются для распознавания и отнесения технологических состояний процесса флотации к определенным категориям. Они позволяют автоматически выявлять режимы работы оборудования, например нормальный ход процесса, начало перегрузки, избыток пены или недостаток реагентов. В отличие от регрессионных моделей, которые предсказывают численные значения, классификационные модели выдают дискретные метки, что упрощает их интерпретацию операторами. Использование таких систем помогает быстрее реагировать на отклонения и предотвращать аварийные или неэффективные режимы.
Показательным примером является работа, где предложен сенсор для классификации сортности хвостов флотации железной руды по изображениям пены на основе гибридной глубокой нейронной сети [24]. Экспериментальные результаты показали высокую точность распознавания и устойчивость модели к вариациям условий съемки, что подтверждает возможность использования таких классификационных сетей.
Сети для распознавания образов занимают особое место среди нейронных моделей, применяемых в анализе флотационных процессов, поскольку они позволяют получать информацию напрямую из визуальных данных. Такие сети, чаще всего построенные на основе сверточной архитектуры, используются для обработки изображений пенной поверхности, анализа ее текстуры, цвета, размера и формы пузырьков [25]. Они могут как решать самостоятельные задачи, такие как обнаружение объектов или семантическая сегментация [26], так и служить основой для задач регрессии и классификации, извлекая признаки для прогнозирования извлечения или определения режимов работы.
Например, сверточная модель, обученная на изображениях, снятых веб-камерой у зоны разгрузки промышленной флотационной камеры, может быть использована для классификации подвижности пены на категории с точностью 98 % [27]. В качестве признака для классификации данная модель использует степень размытости изображения, получаемые прогнозные классы могут служить индикатором стабильной работы флотационной машины в реальных условиях.
Для регрессионных задач на видеоданных эффективны гибридные архитектуры. Например те, что сочетают сверточные и рекуррентные LSTM-модули для быстрого определения зольности концентрата угольной флотации по изображениям пены, обеспечивая высокую точность даже при ограниченных данных, что было показано на примере оценки зольности концентрата при флотации угля [28].
Отдельно стоит выделить эксперименты по использованию нейронных сетей для обнаружения объектов и сегментации. Так, например, использование нейронной сети позволяет снизить на 5,1 % количество пропущенных проходов пеногона по сравнению с классическими алгоритмами компьютерного зрения [29].
Множество работ посвящено оценке размера пузырьков на поверхности пенного слоя, при этом в большей части работ используются сети для сегментации, позволяющие эффективно выделять и анализировать контуры пузырьков, что может быть использовано в качестве исходных данных для моделирования [30, 31].
Нейронные сети с физическим подкреплением
Нейронные сети с физическим подкреплением представляют собой класс гибридных моделей, в которых обучение опирается не только на данные, но и на заранее известные физические закономерности процесса. В контексте флотации это могут быть уравнения гидродинамики, законы массопереноса, кинетика флотации, что позволяет ограничить пространство допустимых решений и исключить физически нереалистичные прогнозы, при этом снижая требования к объему обучающих данных.
В таких моделях физические ограничения и связи могут вводиться непосредственно, через модификацию структуры сети, как это сделано в операторных сетях и их модификациях, за счет разделения сети на блоки, ответственные за изучение и описание аналогов математических операторов [32, 33]. Либо путем введения дополнительных компонентов в функцию потерь, напрямую влияющую на процесс изучения закономерностей, как это сделано в случае с архитектурой PINN, где прогнозные значения помимо соответствия экспериментальным данным должны подчиняться зависимостям, описываемым дифференциальными уравнениями [34].
Так, например, можно интегрировать в модель технологической схемы флотационного обогащения уравнения масс-баланса в дифференциальной форме, что позволяет снизить ошибку прогнозных данных [35]. Аналогичным образом можно осуществить интеграцию в нейронную сеть математических моделей оборудования.
В случае, если имеется модель процесса в форме обыкновенного дифференциального уравнения, она может быть описана особой формой рекуррентной сети Neural ODE, по своему принципу работы напоминающей численную схему интегрирования Эйлера, что может быть успешно применено для моделирования кинетики флотации [36].
Отдельно стоит выделить ветку операторных сетей, способных эффективно прогнозировать нестационарные скалярные и векторные поля, например гидродинамику в камере флотомашины, играющую важную роль в формировании пузырьков, контакте между пузырьками и частицами и др.
Так, показано, что операторные сети могут успешно применяться в качестве моделей для вычислительной гидродинамики [37]. Указанные модели могут использоваться для оперативного прогнозирования гидродинамических условий в зависимости от работы параметров работы аппарата и геометрических характеристик узла импеллер-статор, что может быть полезно как на этапе проектирования оборудования, так и на этапе управления им.
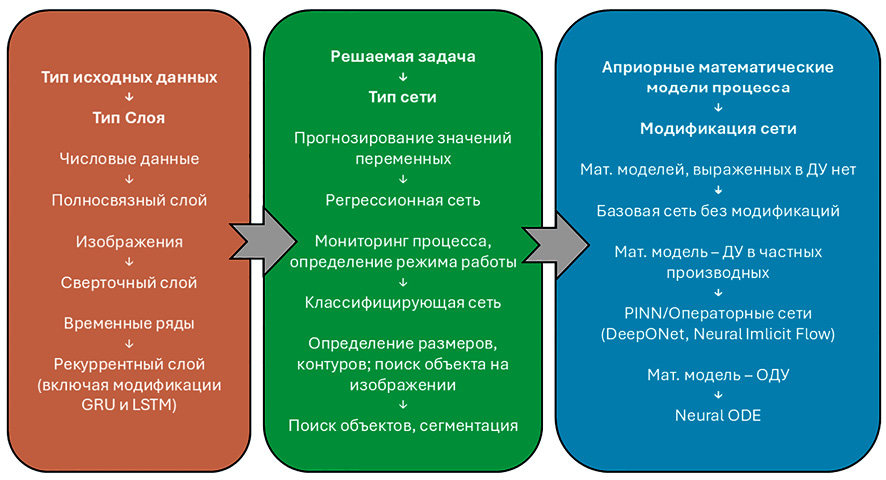
Схема выбора элементов архитектуры нейронной сети Примечание: составлен авторами по результатам данного исследования
Рекомендательная схема по выбору слоев и архитектуры нейронной сети
Анализ рассмотренных выше типов нейронных сетей показывает, что выбор оптимальной архитектуры определяется двумя ключевыми факторами: природой входных данных и характером решаемой задачи. На основе систематизированной информации была составлена схема для подбора архитектурных решений, представленная на рисунке.
Для табличных данных, содержащих измерения датчиков и технологические параметры, предпочтительны полносвязные сети, которые непосредственно обрабатывают векторные представления. Для временных рядов необходимы рекуррентные архитектуры, способные воспринимать временные зависимости и динамику процесса. Визуальные данные требуют сверточных сетей, обеспечивающих эффективное извлечение пространственных признаков. В случае наличия какой-либо априорной информации о системе в форме дифференциального уравнения, можно говорить о возможности применения специальных модификаций с физическим подкреплением.
На основании этой схемы можно принимать решения по выбору архитектуры нейросетевой модели. Например, если целью исследования является разработка кинетической модели флотации, то рационально будет выбрать рекуррентные слои для построения регрессионной модели, так как исходные данные представляют собой связанную последовательность, а в конечном счете требуется спрогнозировать числовое значение. Модель кинетики флотации в данном случае является основанием для использования физически подкрепленной архитектуры NeuralODE. Если же в качестве входных данных используется видеосигнал, по сути являющийся временным рядом из кадров, можно использовать сверточную нейросеть в комбинации с LSTM слоями.
Аналогичным образом можно осуществлять выбор структуры сети для любой иной задачи, которую предполагается решать с помощью нейронных сетей. Необходимо определить тип входных данных, который будет использовать сеть, конечную задачу сети, а также проверить возможность введения физических ограничений на основании существующих математических моделей.
Выводы
В результате систематизации литературных источников, произведенной в этой работе, были достигнуты следующие результаты:
1. Установлено, что выбор слоев и архитектуры нейронной сети для задач флотационного обогащения определяется природой входных данных и характером решаемой задачи. Для табличных данных, как правило, используются полносвязные слои, для временных рядов – рекуррентные, а для изображений – сверточные сети.
2. Отмечено, что возможность применения физически подкрепленной модификации зависит от наличия априорных знаний о процессе, представленных в виде дифференциальных уравнений или физических закономерностей. Применение данной архитектуры позволяет как снизить ошибку прогнозирования, так и уменьшить потребность в большом объеме обучающих данных.
3. Разработана схема, позволяющая осуществлять выбор структурных элементов слоев нейронной сети и архитектуры на основании исходных данных к разработке модели.
Конфликт интересов
Финансирование
Библиографическая ссылка
Александрова Т.Н., Гатиатуллин Б.Л. НЕЙРОННЫЕ СЕТИ В ЗАДАЧАХ ФЛОТАЦИИ МИНЕРАЛЬНОГО СЫРЬЯ: СХЕМА ВЫБОРА АРХИТЕКТУРЫ ПО ТИПУ ДАННЫХ И ПОСТАНОВКЕ ЗАДАЧИ // Успехи современного естествознания. 2026. № 2. С. 77-83;URL: https://natural-sciences.ru/ru/article/view?id=38481 (дата обращения: 22.07.2026).
DOI: https://doi.org/10.17513/use.38481