



В статье исследуется проблема создания расчетно - логических систем (РЛС) и их применения в процессе принятия решений при управлении автоматическими КА. РЛС базируется на периодическом накоплении знаний о полетной информации КА и использования элементов интеллектуального поиска.
В основу проектируемых РЛС положены следующие принципы:
- выделение иерархических уровней телеметрических параметров, что позволяет осуществлять оперативную диагностику работоспособности бортовых систем;
- разработка логических связей между выдаваемыми командными воздействиями и прогнозируемыми состояниями бортовой аппаратуры КА.;
- автоматизированная выработка рекомендаций принятия решений для переведения КА в заданные состояния.
РЛС функционирует в двух режимах: настроечном - на этапе подготовки КА к управлению и оперативном - в процессе управления КА.
Использование РЛС позволяет обеспечить мониторинг бортовых систем КА, дать прогноз работоспособности бортовой аппаратуры на последующий период времени, выработать дальнейшие программы управления КА.
Описаны примеры применения РЛС в процессе оперативного управления автоматическими КА. Дается вывод о существовании большого резерва по надежности и оперативности управления КА в процессе устранения нештатных ситуаций.
1. Введение
При управлении КА чрезвычайно важной задачей является принятие правильного и оперативного решения по воздействию на бортовые системы аппарата, особенно при возникновении нештатных ситуаций. Ошибочное или несвоевременно принятое решение может привести к срыву программы полета, а в ряде случаев и к более серьезным негативным последствиям.
Для принятия правильного решения персоналу управления необходимо оперативно оценить состояние бортовых систем КА, представленных значениями многочисленных телеметрических параметров (ТМП), определить и выдать на борт КА правильную последовательность командных воздействий и установить факт их исполнения непосредственно в сеансах связи с аппаратом. Данная задача достаточно сложна в условиях сопутствующих жестких временных ограничений.
Представляется перспективным создание расчетно - логических систем (РЛС), основанных на периодическом накоплении знаний о полетной информации КА и использовании элементов интеллектуального поиска при принятии решений. В настоящей работе рассматривается пример использования РЛС в ходе управления КА в условиях нештатных ситуаций.
2. Принципы построения расчетно - логических систем
Целевым назначением РЛС является организация автоматизированного цикла выдачи рекомендаций по принятию решений при управлений автоматическими КА. На основе анализа значений ТМП должно быть обеспечено оперативное решение следующих задач:
- дана логическая интерпретация данных, т.е. определен смысл полученных ТМП;
- проведена диагностика состояния систем, т.е. установлено наличие (или отсутствие) неисправностей элементов бортовой аппаратуры;
- обеспечен мониторинг системы, т.е. в реальном масштабе времени решены первые две задачи;
- дан прогноз работоспособности бортовых систем на последующий период времени;
- выработана дальнейшая программа управления бортовыми системами КА.
Опишем последовательность этапов создания РЛС.
На первом этапе на основе разработанной документации формируется база данных РЛС, в которую вносится наименования ТМП, их логический смысл, номинальные значения, допустимые верхний и нижний пределы. Это дает возможность автоматизировано проводить интерпретацию и диагностику бортовых систем КА в фиксированные моменты времени. Следует отметить, что для различных режимов работы КА, которые определяются задаваемыми временными программами управления (ВПУ), нормальное состояние бортовых систем будет характеризоваться различными наборами значений ТМП. Поэтому для оценки работоспособности КА в БД РЛС закладывается набор номинальных и предельных значений ТМП в зависимости от всех возможных режимов работы КА. Это позволит на основе задаваемых ВПУ U(t) определить зависимости нормальных значений ТМП по времени и провести мониторинг бортовых систем путем сравнения этих зависимостей с реальными телеметрическими данными. На основе результатов мониторинга систем в базе данных формируются рекомендации для оператора управления о необходимости (или об отсутствии необходимости) внесения внешних корректирующих командных воздействий.
Следующий этап построения БД РЛС заключается в формировании логических соответствий между подаваемыми командными воздействиями и состояниями элементов бортовой аппаратуры, т.е. совокупностями соответствующих значений ТМП. Это позволит при выявлении неисправностей работы бортовой аппаратуры выработать рекомендации оператору управления о необходимости выдачи командных воздействий на борт КА с целью приведения аппаратуры в нормальное состояние.
Итак, РЛС функционирует в двух режимах:
1) Настроечный режим, используемый на этапе подготовки КА к управлению. На основе задаваемых на борт КА временных программ управления U(t) определяются зависимости всех существующих в БД РЛС ТМП и их допустимых значений от времени. Эти зависимости ТМПэ(t) считаются эталонными и характеризуют нормальное состояние работы бортовых систем.
2) Оперативный режим, применяемый в процессе управления КА. Полученные эталонные зависимости сравниваются с реальными данными ТМПр(t), поступающими с борта КА. Формируются сообщения о наличии (или отсутствии) несовпадений эталонных и реальных зависимостей. На их основе вырабатываются рекомендации о выдаче необходимых командных воздействий.
3. Формирование иерархических групп анализируемых ТМП
Для повышения оперативности и надежности проведения мониторинга бортовых систем и последующего формирования командных воздействий на КА выделим 5 основных иерархических групп анализируемых ТМП.
Эти группы классифицируются по последующим ситуациям, возникающим при выходе ТМП за допустимые пределы:
1) Состояние бортовых систем не приводит к срыву программы полета. Например, некоторое повышение или понижение температур в отдельных блоках, задержка с выходом на режим систем термостатирования, подогрева и т.д..
К этой же группе относятся дублированные ТМП, т.е. состояние системы можно оценить без учета значений этих параметров. Например, работа отдельных узлов систем оценивается соответствующими значениями тока, напряжения и мощности. По каждому из этих ТМП можно судить о наличии сигнала в рассматриваемом узле.
2) Отдельные фрагменты программы полета не выполняются. Однако это не приводит к срыву программы полета в целом. Например, для оценки соответствия наземной и бортовой шкал времени в сеансе связи с КА планируется проведение избыточного выполнения режимов «Сверка времени». При выполнении 2 -3-х режимов из 5-ти можно считать, что полученная информация является достаточной для получения достоверной оценки.
3) Неисправности отдельных блоков систем приводят к понижению эффективности работы бортовой аппаратуры, но не к срыву программы полета. Например, при снижении выходной мощности передатчика получаемая целевая информация может иметь пониженное качество в виде частичных искажений.
4) Выявленные неисправности приводят к срыву программы работы отдельных систем, но не всего КА. Например, отказ в работе аппаратуры метеокомплекса не приводит к срыву работы другой целевой аппаратуры КА.
5) Неисправность аппаратуры может привести к срыву всей программы полета КА, а так же к частичной или полной потере работоспособности КА. Например, наличие полного разряда химической батареи, потеря ориентации КА, перегрев передающего устройства и т.д.
В таблице 1 приводятся основные характеристики каждой группы ТМП, а так же рекомендации для оператора управления при возникающих ситуациях.
Таблица 1. Основные характеристики каждой группы ТМП, а так же рекомендации для оператора управления при возникающих ситуациях
|
№ |
Интерпретация ситуации |
Суть анализа ТМП |
Рекомендации оператору управления |
|
1 |
Малоинформативные ТМП |
Набор статистики, поиск закономерностей |
Отсутствие необходимости выдачи команд на борт КА |
|
2 |
Диагностика работы отдельных узлов бортовых систем |
Набор статистики, поиск причин неисправности |
Выдача команд на усмотрение оператора управления |
|
3 |
Диагностика качества выполнения программы |
Проверка правильности формирования программ управления |
Коррекция программ управления КА, изменение комплектации аппаратуры |
|
4 |
Диагностика работы бортовых систем в целом |
Оперативное выяснение причин неисправности, коррекция программ управления |
Желательно принятие оперативного решения в сеансе связи с КА |
|
5 |
Диагностика работы аппаратуры КА в целом |
Оперативное выяснение причин, срочное принятие решений |
Необходимо принятие операт. решения о выдаче разовых команд |
Таким образом, общая схема функционирования расчетно - логической системы имеет вид:
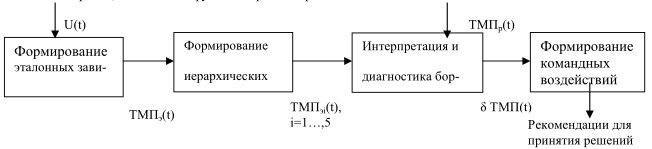
Рисунок 1. Схема функционирования расчетно - логической системы
4. Использование РЛС при управлении в процессе нештатных ситуаций
На этапе подготовки к полету КА расчетно - логическая система формируется на основе штатной документации и используется в идентифицированных условиях управления КА. Вместе с тем, при определенной доработке применение РЛС может дать хороший эффект и при устранении непрогнозируемых нештатных ситуаций. Для этого возникающие ситуации детально анализируется; проводятся идентификация вновь полученных состояний КА; разрабатываются новые логические алгоритмы, связывающие эти состояния с необходимыми корректирующими управляющими воздействиями. Затем в РЛС добавляются новые алгоритмы идентификации, диагностики состояния КА и выработки рекомендаций по формированию управляющих команд.
Таким образом, добавляется информационное содержание РЛС, приобретаются новые логические функции и расширяются возможности ее применения при управлении КА.
Приведем характерный пример. В процессе управления российско-украинским КА "Океан-О", оказалась неэффективной штатная схема разгрузки двигателя - маховика в канале тангажа при возникновении чрезвычайно сильных магнитных бурь. В этих случаях плотность атмосферы сильно изменялась и возникал очень большой возмущающий момент в канале тангажа. Для его компенсации с помощью вращения двигателя - маховика создавался кинетический момент противоположного знака. Однако, в связи с недостаточной эффективностью работы контура магнитной разгрузки кинетический момент достигал своего предельного значения и в дальнейшем не компенсировал возмущающий момент. Это могло привести к потере ориентации КА и к срыву программы полета. В 2000-2002 г.г. магнитные бури имели место достаточно часто. Известен факт, что 15-16 июня 2000г. в период возникновения самой сильной за последние 10 лет магнитной бури японский научно - исследовательский спутник ASCA потерял ориентацию и прекратил свое существование.
Для обеспечения поддержания ориентации КА "Океан-О" была предложена новая схема разгрузки двигателя - маховика, основанная на проведение периодических коррекций положения солнечных батарей (СБ) с целью создания необходимого сочетания аэродинамического и гравитационного моментов по каналу тангажа, компенсирующего возмущающий момент. Это потребовало очень точного и быстрого расчета необходимых значений углов поворота СБ, программы их отработки, формирования необходимых командных воздействий и их выдачу непосредственно в сеансах связи, длительность которых не превышает 10 минут. Такая задача оказалась трудноразрешимой даже очень хорошо подготовленным специалистам. Для ее выполнения был организован автоматизированный технологический цикл по принятию решений в многомерной задаче, целевая функция которой включает:
1. Поддержание ориентации КА;
2. Обеспечение требуемого энергобаланса;
3. Выполнение заданной программы полета.
Следует отметить, что решение этих задач носит компромиссный характер. Так, выполнение третьей задачи реализуется при необходимом режиме энергопотребления, что достигается лишь при определенных значениях угла поворота СБ. Однако при некоторых значениях этих углов невозможно поддержание необходимой ориентации КА. В таких случаях приоритет отдается решению первой задачи с необходимой коррекцией программы полета.
Для организации логического цикла выработки решений по устранению нештатных ситуаций был разработан следующий алгоритм. Были выделены ТМП, используемые в этом алгоритме и входящие в пятую группу (см. табл. 1):
- VZ - кинематический момент в канале тангажа. Предельные значения VZ составляют ±20Нмс;
- УНП - угол наклона панелей СБ. Он отсчитывается против часовой стрелки от положения, параллельного набегающему воздушному потоку. Так при УНП = 0 аэродинамический момент в канале тангажа является минимальным, а при УНП =900 - максимальным.
В каждом сеансе связи анализируется значение VZ и величина его изменения в период от предыдущего витка n до текущего витка m:
![]()
Выдача рекомендаций о повороте СБ производилась при выполнении следующих условий:
- вращение двигателя - маховика в канале тангажа значительно возрасло относительно номинального положения:
![]()
![]()
- скорость изменения вращения достаточно велика:
Для расчета изменения угла поворота СБ используется формула:
∆ УНП =20 sign (∆VZ).
Время поворота батареи вычисляется по формуле:
![]()
где V - скорость поворота СБ.
При этом РЛС формирует рекомендацию о выдаче разовой команды (РК) на поворот СБ вправо (или влево), а через время ∆t о выдаче РК на остановку движения СБ.
Эта рекомендация выполняется при обеспечении энергобаланса КА, требуемого для выполнения заданной программы полета:
![]() (1)
(1)
где WTP - требуемое энергопотребление КА для выполнения программы полета, включающей работу i бортовых систем в течение времени ti; Wреал - реальное энергопоступление на КА при угле наклона СБ, равным УНП в течение всего времени выполнения программы полета.
Значения WTP и Wреал рассчитываются в РЛС на основе документации Главного конструктора.
Если WTP > Wреал , то программа полета изменяется в сторону уменьшения ее энергопотребления до выполнения условия (1).
На рис.2 показана функциональная схема цикла выдачи рекомендаций по принятию решений.
Использование приведенного выше алгоритма позволило обеспечить ориентированное движение КА «Океан-О» и успешно выполнить программу научных экспериментов в течение 2,5 лет.
Рисунок 2. Функциональная схема цикла выдачи рекомендаций по принятию решений
5. Заключение
Практика управления автоматическими КА («Океан-О», «Метеор-3М») показала высокую эффективность применения РЛС как в номинальных условиях, так и при возникновении нештатных ситуаций. Внедрение дополнительных алгоритмов позволяет расширить информационную базу знаний РЛС и повысить оперативность и надежность устранения нештатных ситуаций. В дальнейшем предполагается использовать РЛС при управлении практически любыми автоматическими КА при ее доработке с учетом специфики работы бортовых систем.
СПИСОК ЛИТЕРАТУРЫ
- В.А Удалой, Н.М. Иванов, Н.Л. Соколов, В.Ю. Паздников. Особенности управления космического аппарата "Океан-О" в условиях сильных магнитных бурь. Международный симпозиум. Аэрокосмические приборные технологии. Санкт-Петербург. 2002г.
- L.A. Bocharov, N.L. Sokolov, V.A. Udaloy. Organization of an intellectual searching to support vehicles control. ICSCCW 2003. Second International Conference on Soft Computing and Computing with Words in System Analysis, Decision and Control. Antalya, Turkey. September 9-11, 2003.
Работа представлена на II научную конференцию с международным участием «Приоритетные направления развития науки, технологий и техники», 20-27 ноября 2004г. Шарм-эль-Шейх (Египет)
Библиографическая ссылка
Соколов Н. Л., Удалой В. А. ИСПОЛЬЗОВАНИЕ РАСЧЕТНО – ЛОГИЧЕСКИХ СИСТЕМ ДЛЯ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ КА // Успехи современного естествознания. 2004. № 11. С. 70-74;URL: https://natural-sciences.ru/ru/article/view?id=13706 (дата обращения: 29.03.2026).