



Рассмотрим регулярные методы оптимизации, разработанные на основе детерминированной модели параметрического регулирования.
Использование чисто аналитических методов оптимизации связано с определенными трудностями. Например, не всегда возможно построить единое соотношение связывающее совокупность входных параметров с функцией цели (особенно для схем средней и высокой размерности). Определение положения экстремума единой формулой, несомненно, является достоинством аналитического метода. Однако для преодоления трудностей, связанных с употреблением громоздких выражений, необходимо вводить множество ограничений и допущений, приводящих к снижению точности, чувствительности и адекватности реальному устройству.
В большинстве случаев задача оптимизации решается численными методами на основе построенных алгоритмов, не дающих конечную формулу, а лишь указывающих способ отысканная экстремумов. Однако если отказаться от использования единого аналитического выражения, связывающего регулируемые параметры с функцией цели, и использовать совокупность выражений с переменными параметрами, то решение задачи упрощается.
Суть предлагаемого метода состоит в том, что при вариациях регулируемых параметров вид очередного аналитического выражения ставится в зависимость от предыстории и величины изменения очередного параметра. Поэтому регулировочная модель будет представлять собой совокупность соотношений, параметры которых формируются в процессе регулирования, на основе результатов предшествующих вариаций. Изменение параметров функции цели выполняется в точках оптимума при вариациях текущего параметра регулируемой компоненты.
Построение регулировочной модели базируется на использовании метода исключения варьируемого параметра, и основывается на анализе информации полученной при измерении регулировочных признаков Т1 и Т2 [1, 2].
Алгоритм построения диагностико-регулировочной модели состоит из следующих этапов:
1. Формирование массива основных диагностических признаков объекта регулирования, представленного в виде n-полюсной системы:
 (1)
(1)
где  - общее количество каналов потенциально возможных для диагностирования; Т1, Т2, ......, ТM - функции передачи каналов прохождения тестового сигнала (регулировочные признаки); m - количество структурных единиц многополюсной системы; Сn2 - число сочетаний из n элементов по два; n - количество полюсов многополюсной системы.
- общее количество каналов потенциально возможных для диагностирования; Т1, Т2, ......, ТM - функции передачи каналов прохождения тестового сигнала (регулировочные признаки); m - количество структурных единиц многополюсной системы; Сn2 - число сочетаний из n элементов по два; n - количество полюсов многополюсной системы.
2. Выбор по назначенным критериям двух оптимальных каналов прохождения тестового сигнала с функциями передачи Т ав - cd и Т kp - hl.
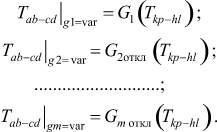
3. Формирование соотношений зависимости выбранных функций передачи от величины варьируемых параметров.
 (2)
(2)
4. Поэтапное исключение варьируемых параметров gi из системы (2)
 (3)
(3)
Рассмотрим движение точки состояния в пространстве регулировочных признаков при поэтапной вариации всеми m параметрами. Процесс перемещения точки текущего состояния (из п. 1 в п. 2, рис. 1) при вариации диагностируемого параметра gi описывается одним из соотношений системы (3)

где а1, b1 - cooтветственно, нижняя и верхняя границы изменения параметра gi . z - номер варьируемого параметра. В точке 2 значение варьируемого параметра gi|i = z достигает предельной величины gi = b1. При вариации следующим параметром gi|i =z + 1 траектория перехода точки состояния из положения 2 в положение 3 описывается новым соотношением отличным от

аналогичного соотношения системы (3)

описывающем траекторию движения точки состояния при вариации z + 1-го параметра, но не имеющем предысторию вариации z-го параметра.
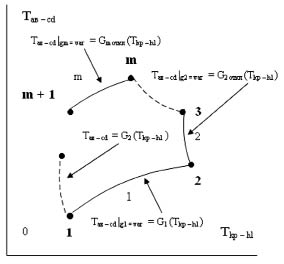
Рис. 1. Траектория движения точки состояния в пространстве регулировочных признаков
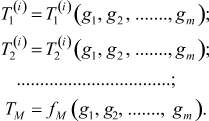
После вариации всеми m параметрами в пределах ai gi bi,  , cистема (3) преобразуется в новую систему, содержащую информацию о предыстории в виде измененных коэффициентов полиномов аналитических соотношений функций передачи каналов диагностирования (4).
, cистема (3) преобразуется в новую систему, содержащую информацию о предыстории в виде измененных коэффициентов полиномов аналитических соотношений функций передачи каналов диагностирования (4).
 (4)
(4)
Полученная система связывает основные регулировочные признаки Тав - cd и Тkp - hl при вариациях параметров g1, g2, ......, gm. При рассмотрении в качестве Тав - cd и Тkp - hl только безразмерных функций цепи (например, коэффициент передачи по напряжению) можно обосновать достаточность использования только двух каналов диагностирования из всей совокупности функций передачи порождаемых многополюсной системой [2].
Вид модели меняется в поворотных точках смены варьируемого параметра. Эти точки одновременно являются точками локального оптимума по регулируемому на данном этапе параметру gi.
Но прежде чем выполнять поиск локальных экстремумов при вариациях каждой из компонент, необходимо построить массив допустимых изменений параметров компонент.
В такой ситуации полезными оказываются интервальные методы определения границ изменения исходных параметров отдельных компонент исследуемой схемы. Поэтому целесообразно будет выбрать интервальную арифметику в качестве основного инструмента формирования массива интервалов компонент, построенных из условий сохранения номинальных статических, динамических и др. режимов работы ЭСА. Это оправдано, т.к. интервальные методы позволяют находить интервалы, гарантировано содержащие решения поставленных задач.
Преимущество состоит в получении строгих оценок для самих искомых величин, а не для вероятностных характеристик, которые не могут гарантировать определенный исход одного конкретного опыта. При интервальном подходе операции над неопределенными величинами заменяются операциями над областями, с дальнейшей аппроксимацией области неопределенности классом областей зависящем от конечного числа параметров.
После анализа системы интервальных уравнений становятся известными допустимые границы изменения регулируемых параметров, не нарушающих номинального режима работы объекта регулирования.
Возвращаясь к ранее сказанному, опишем механизм построения регулировочной модели, предполагая, что массив результирующих интервалов уже известен. После решения системы интервальных уравнений, по найденным интервалам строится траектория движения точки состояния в пространстве регулировочных признаков. Этапу построения траектории предшествует этап вариации всеми m параметрами компонент с использованием уравнений диагностико-регулировочной модели:
 (5)
(5)
где - количество варьируемых параметров; Т - регулировочный признак; gi - варьируемый параметр. Последовательность параметров gi, подлежащих регулированию, оценивается по чувствительности регулировочных признаков Т1 и Т2 к величине отклонения i-го регулируемого параметра.
Величина чувствительности пропорциональна скорости изменения регулировочного признака по каждому из параметров gi , для нахождения которой вычисляются частные производные первого порядка от признака по регулируемому параметру:

Формируется матрица чувствительностей регулировочных признаков S.
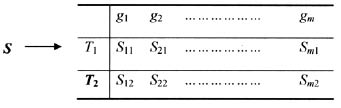
Строки матрицы соответствуют выбранным регулировочным признакам, а столбцы варьируемым параметрам. Для определения порядка регулирования компонент выполняется суммирование элементов матрицы S по столбцам и нахождение суммарной чувствительности двух каналов прохождения тестового сигнала для каждого из регулируемых параметров.
Строится вектор суммарных чувствительностей S*

Компоненты вектора S* упорядочиваются по максимуму интегральной чувствительности, определяющему порядок регулирования компонент.
Далее производится поочередное изменение всех gi в установленном порядке на величины их интервалов, полученных при анализе устройства.
Максимум запаса работоспособности по каждому из регулируемых параметров ищется в пределах каждого текущего интервала ∆gi в соответствии с моделью (5). При этом не требуется увеличения размерности пространства регулировочных признаков при увеличении количества регулируемых компонент. Размерность пространства регулировочных признаков остается постоянной за счет процедуры исключения варьируемого параметра из системы уравнений для регулировочных признаков.
Следует отметить, что связь между входными и выходными параметрами в реальных условиях носит, как правило, нелинейный характер, тогда как большинство методов определения запаса работоспособности требуют наложения искусственного условия равенства скорости движения отображающей точки по всем направлениям. Для снятия этого ограничения целесообразно задавать критерии оптимизации в пространстве оптимизационных признаков, связанных с входными параметрами посредством диагностико-регулировочной модели (5).
При работе с детерминированными моделями, отказ от функции цели как от единого аналитического выражения или алгоритмического правила дает некоторые упрощения при решении задачи оптимизации. Сначала решается система интервальных уравнений, определяющих допустимые границы изменения первичных параметров, с дальнейшим определением границ изменения оптимизационных признаков. Это дает возможность определять значения параметров внутри каждого из интервалов ∆gi равноудаленные от допустимых границ во времени (оптимизировать, смещая величины самих параметров gi к серединам интервалов, невозможно из - за неравенства скоростей изменения параметров по различным направлениям).
После нахождения массива интервалов ∆gi положение точки состояния внутри каждого из интервалов необходимо скорректировать. Точка состояния должна быть установлена на равных во времени расстояниях от границ интервалов.
Для разрешения этой задачи необходимо знать закон изменения параметров компонент во времени. Однако подобные соотношения носят, как правило, статистический характер, и для отдельно взятой компоненты трудно идентифицированы. Здесь представляется два пути разрешения проблемы: Если для отдельно взятых составляющих компонент ЭСА временные зависимости gi = F(t) получены, то задача оптимизации на максимум работоспособности ЭСА будет сводиться к нахождению равного во времени от границ интервалов gi min, gi max положению точки состояния.
Для нахождения положения оптимизации используется условие равного времени: t(-) = t(+), где t(-) - время перемещения точки состояния до нижней границы интервала gi min; t(+)- время перемещения точки состояния до верхней границы интервала g i max.
При решении системы относительно gi , находится положение оптимизации точки состояния. Если увеличение и уменьшение параметра gi во времени описываются одной и той же зависимостью, то покомпонентная вариация параметрами gi позволяет оптимизировать ЭСА по каждой компоненте вектора входных параметров в отдельности.
Диагностико-регулировочная модель применяется в качестве индикационной функции, используемой для нахождения положения оптимизации в пространстве регулировочных признаков. Это дает возможность осуществлять контроль процесса регулирования непосредственно на объекте, не нарушая его топологии.
Вычисляя значения признаков Т1 и Т2 в точках gi = g i опт, получаем координаты точки оптимизации Т1 опт и Т2 опт в пространстве регулирования.
При покомпонентном регулировании оптимизация на максимум запаса работоспособности СЭО выполняется по параметру одной компоненты, в следствии этого вопрос корреляционных зависимостей интервальных значений параметров компонент снимается. Это дает возможность ограничиться рассмотрением детерминированной модели оптимизации (рис. 2).

Рис. 2. Поинтервальная оптимизация выходных параметров устройства
Процедура параметрической оптимизации выполняется в два этапа: этапа рабочего анализа электрического режима ЭСА и этапа регулирования. Этап анализа выполняется в режиме рабочего функционирования объекта регулирования, результатом проведения которого становятся данные о допустимых границах варьирования параметров компонент ЭСА. В рамках полученных границ производится регулирование на максимум работоспособности, не выводящее за пределы рабочего режима ЭСА. Этап регулирования выполняется на основе диагностико-регулировочной модели с помощью описанной выше методики. Это дает возможность заменить громоздкие методики, построенные на основе использования аналитических выражений целевых функций градиентных, граничных и т. д. методов, традиционно применяемых при оптимизации ЭСА.
Таким образом, модель построенная методом исключения варьируемого параметра может быть использована при решении задачи оптимизации эксплуатации при выполнении упреждающего регулирования с целью коррекции работоспособности объектов судовых электрических средств автоматизации.
Список литературы
- Пюкке Г.А., Портнягин Н.Н., Кузнецов С.Е. Диагностирование электрических цепей методом изовар / Изв. вузов. Электромеханика. - 1998. - №1. - С. 35-40.
- Пюкке Г.А., Портнягин Н.Н., Кузнецов С.Е. Методы регулирования при решении задачи параметрической оптимизации судового электрооборудования / Электрофорум. Научно-инженерный журнал / ЦНИИСЭТ. - СПб., 2001. - №1. - С. 22-23.
- Ильин В.Н. Машинное проектирование электронных схем. - М.: Энергия, 1972. - 280 с.
Библиографическая ссылка
Портнягин Н.Н., Пюкке Г.А., Горева Т.И. ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СУДОВЫХ ЭЛЕКТРИЧЕСКИХ СРЕДСТВ АВТОМАТИЗАЦИИ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ МЕТОДА ИСКЛЮЧЕНИЯ ВАРЬИРУЕМОГО ПАРАМЕТРА // Успехи современного естествознания. 2011. № 4. С. 150-154;URL: https://natural-sciences.ru/ru/article/view?id=21205 (дата обращения: 04.07.2025).