



Данная работа посвящена исследованию в автоматизированной системе T-Flex нагруженного состояния двухсателлитного механизма, показанного на рисунке 1. Планетарный механизм содержит в своей структуре центральное (1) и опорное (6) зубчатые колеса, два сателлита (2 и 3), которые соединяются с водилом (5) через трехпарное звено (4). Для обеспечения условия подвижности W = 1 , согласно формуле Чебышева П.Л., такой механизм выполняется с применением четырехзвенной группы Ассура (звенья 2, 3, 4, 5), присоединенной к ведущему центральному колесу 1.
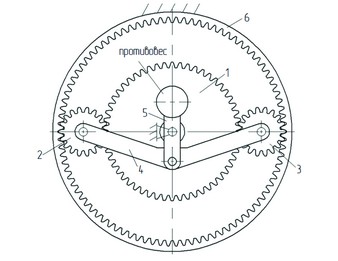
Рисунок 1 – Двухсателлитный планетарный механизм с четырехзвенной группой Ассура
Задача определения характера распределения нагрузки по сателлитам решалась с использованием САПР «T-Flex Динамика», в которой была создана трехмерная модель двухсателлитного планетарного механизма, согласно рисунку 1. Ведущему звену – центральному колесу задавалось внешнее усилие в виде вращающего момента движущих сил, и с помощью специальных датчиков, установленных на сателлиты, измерялась величина воспринимаемой нагрузки. На рисунке 2 представлены полученные с датчиков результаты вычислительного эксперимента.
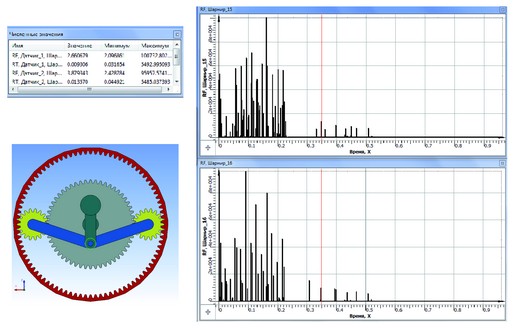
Рисунок 2 – Анализ динамики двухсателлитного планетарного механизма
Анализ такого механизма [1] в программном комплексе T-Flex показал, что нагрузки распределяются вполне равномерно по двум сателлитам (пиковые значения величины нагрузки в момент разгона свидетельствуют о самоустанавливаемости механизма). Однако появляется задача обеспечения равномерности хода такой машины, задача и необходимость расчета противовеса для уравновешивания рычажных звеньев.
Создание планетарных многосателлитных передач при условии присоединения к ведущему звену – центральному колесу группы звеньев, обладающей нулевой подвижностью, позволит уменьшить габариты и увеличить срок службы редуктора.
Научный руководитель: Дворников Л.Т., д.т.н., профессор