



Под безводильным сателлитом понимается зубчатое колесо планетарного механизма с подвижной геометрической осью, не имеющее непосредственного контакта с водилом. Простейшая схема механизма с безводильным сателлитом показана на рисунке 1,а, где обозначена, 1- центральное ведущее колесо, 2-безводильный сателлит, 3- неподвижное колесо с внутренним зацеплением.
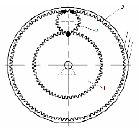 а)
а) 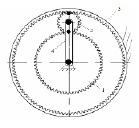 б)
б)
Рисунок 1- Односателлитный планетарный механизм
Совершенно очевидно, что если задать центральному колесу 1 движение, то и сателлит 2 будет двигаться вполне определенно, т.е. подвижность такого механизма равна единице, W=1. Этот механизм описывается формулой Чебышева П.Л.
W=3n-2p5-p4, (1)
где n-число подвижных звеньев механизма, p5-число одноподвижных кинематических пар (шарниров) пар в нем, p4- число двухподвижных пар - высших.
В рассматриваемом механизме (рисунок 1а) подвижность W=1, звеньев n=2 (колеса 1 и 2), одноподвижных кинематических пар p5 =1 (соединение колеса 1 со стойкой 0). Если подставить W=1, n=2 и p5 =1 в формулу (1) и решить ее относительно p4 , то получим p4 =3. Это означает, что определенность движения в механизме достигается тем, что сателлит 2 входит в соединение с ведущим звеном и неподвижным колесом в три двухподвижные пары p4 т.е. вполне устанавливается через три точки, при этом механизм оказывается работоспособен. Недостаток такого механизма заключается в том, что снять движение с сателлита весьма затруднительно. Хорошо известно решение этой задачи через непосредственное соединение сателлита с водилом, как это показано на рисунке 1,б. В этом случае число звеньев становится равным трем (n=3 ), это - колесо 1, сателлит 2 и водило 4. Сателлит теперь устанавливается в механизме через одну точку в соединении с водилом (p5 ) и двумя точками в соединении с центральными колесами (p4 =2), при этом водило входит в соединение со стойкой парой p5 , т.е. по (1) получим, что описанный механизм имеет подвижность W=1.
Вполне возможна и иная конструкция планетарного односателлитного механизма, позволяющая обеспечить соединение безводильного сателлита с водилом. Для того, чтобы сателлит не потерял возможности самоустановливаться через 3 кинематические пары p4 на центральных колесах, необходимо связать его с водилом через дополнительный рычаг, как это показано на рисунке 2.
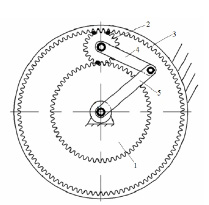
Рисунок 2 – Планетарный механизм с дополнительным рычагом
В такой схеме планетарного механизма общее число подвижных звеньев n=4, число одноподвижных кинематических пар p5 =4, число двухподвижных пар p4 =3 и подвижность его по формуле (1) становится равной единице. Структурно такой механизм состоит из ведущего звена 1 и двух последовательно соединенных групп нулевой подвижности, сателлита 2 с тремя парами p4 и диады 4-5. Безводильные сателлиты получили широкое применение в шестеренных гидромашинах с переменным объемом рабочей камеры.
Научный руководитель: Дворников Л.Т., д.т.н., профессор