



В поршневом насосе (рисунок 1) кривошип, шатун и поршень, определяющие его продольный габарит, движутся в одной плоскости [1, стр. 406]. В условиях, требующих ограниченного (меньшего) рабочего пространства, такое устройство не всегда может быть использовано.
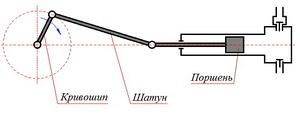
Рисунок 1. Кинематическая схема поршневого насоса
В связи с этим конструкция поршневого насоса может быть преобразована за счет уменьшения его продольного габарита путем помещения кривошипа и шатуна в плоскость, перпендикулярную движению поршня. Такое техническое решение было реализовано в конструкции привода насосной установки [2], представленной на рисунке 2.
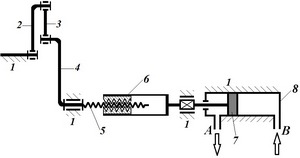

Рисунок 2. Кинематическая схема привода насосной установки
В этом механизме кривошип и шатун работают в плоскости, перпендикулярной движению поршня, что позволяет существенно уменьшить продольный габарит механизма. Рассмотрим строение и принцип действия этого устройства. Привод насосной установки включает стойку 1, кривошип 2, шатун 3, коромысло 4, выполненное за одно целое с винтом 5, гайку 6, жестко соединенную с поршнем насоса 7, и гидроцилиндр 8, установленный на стойке 1.
Кривошип 2 входит со стойкой 1 и шатуном 3 во вращательные пары пятого класса р5, коромысло 4 также образует с шатуном 3 и стойкой 1 вращательные пары пятого класса р5, винт 5, выполненный за одно целое с коромыслом 4, образует с гайкой 6 винтовую пару пятого класса р5, а поршень 7, жестко соединенный с гайкой 6, входит с гидроцилиндром 8 в поступательную пару пятого класса р5.
Привод насосной установки относится к неодносемейственным механизмам [3]. В нем звенья 1, 2, 3 и 4 образуют плоский кривошипно-коромысловый механизм третьего семейства [4, стр. 88], подвижность которого определится по формуле [4, стр. 85, формула (3.8)], как
W3=3n-2p5=3∙3-2∙4=9-8=1.
Звено 6 образует однозвенную группу нулевой подвижности (W4=0) четвертого семейства [4, стр. 89], которая через винтовую пару присоединяется к кривошипно-коромысловой части механизма, а через поступательную пару - к гидроцилиндру, установленному на стойке. Подвижность этой группы определится по формуле [4, стр. 85, формула (3.9)]
W4=2n-p5=2∙1-1∙2=0.
Таким образом, общая подвижность привода насосной установки оказывается равной
W=W3+W4=1+0=1.
Полученный результат доказывает, что в механизме достаточно задать движение любому из звеньев, чтобы вся система начала двигаться вполне определенно.
Научный руководитель: Дворников Л.Т., д.т.н., профессор