



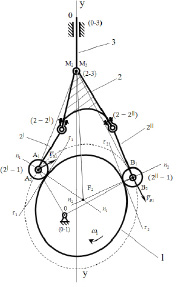
В работе [1] был описан новый четырехзвенный кулачковый механизм с изменяемым законом движения толкателя. В настоящей статье показывается метод его кинематического анализа. Механизм показан на рисунке 1-а. Движение механизма задается от кулачка 1. Скорости точек А1 VA1=w1·lOA и В1 VB1=w1·lOB, принадлежащих звену 1, перпендикулярны радиусам lOA и lOB соответственно и направлены в сторону вращения звена 1. Величины векторов этих скоростей показаны на плане скоростей (рисунок 2-б), как pa1 и pb1.
Мгновенный центр поворота F2 звена 2 находится на пересечении перпендикуляров n1n1 и n2n2, проведенных из точек А и В к касательным τ1τ1 и τ2τ2 к профилю кулачка. Скорость мгновенного центра F2 находится из решения системы уравнений
где  и
и  - скорости точки F2 относительно точек А1 и В1 соответственно. Известными являются направления этих скоростей.
- скорости точки F2 относительно точек А1 и В1 соответственно. Известными являются направления этих скоростей.
Скорость точки M2, принадлежащей звену 2, теперь может быть определена по уравнениям
Направление вектора  известно, оно параллельно оси yy.
известно, оно параллельно оси yy.
 а)
а) 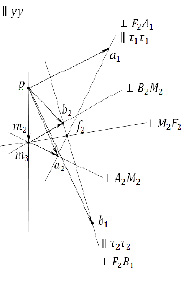 б)
б)
Рисунок 1 – Четырехзвенный кулачковый механизм с изменяемым законом движения толкателя и его план скоростей
Относительная скорость точки M2- перпендикулярна линии М2F2. Если из точки f2 на плане скоростей провести линию, перпендикулярную линии М2F2, то на пересечении ее с линией, параллельной уу, найдем точку m2 – конец вектора абсолютной скорости точки M2 равной вектору скорости M3. Зная скорость точки М2, можно найти скорости точек А2 и В2, принадлежащих звену 2, по уравнениям
перпендикулярна линии М2F2. Если из точки f2 на плане скоростей провести линию, перпендикулярную линии М2F2, то на пересечении ее с линией, параллельной уу, найдем точку m2 – конец вектора абсолютной скорости точки M2 равной вектору скорости M3. Зная скорость точки М2, можно найти скорости точек А2 и В2, принадлежащих звену 2, по уравнениям

Относительные скорости точек А2 -  А2М2, В2 -
А2М2, В2 -  В2М2 перпендикулярны отрезкам А2М2 и В2М2, соответственно. Вектор
В2М2 перпендикулярны отрезкам А2М2 и В2М2, соответственно. Вектор  A2A1направлен параллельно прямой τ1τ1, а вектор
A2A1направлен параллельно прямой τ1τ1, а вектор  В2В1параллелен прямой τ2τ2.
В2В1параллелен прямой τ2τ2.
Закон движения толкателя 3 может быть изменен использованием клеммовых соединений (2–2 ) и (2–2
) и (2–2
 ) позволяющих отклонять звенья 2
) позволяющих отклонять звенья 2 и 2
и 2
 относительно звена 2.
относительно звена 2.
Научный руководитель: Дворников Л.Т., д.т.н., профессор