



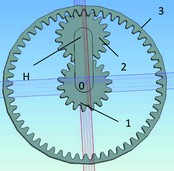
Известный односателлитный планетарный механизм (рисунок 1,а), содержит в своем составе три подвижных звена - колесо 1, сателлит 2 и водило H. Опорное колесо 3 является неподвижным. Эти звенья соединены в три шарнира (p5= 3) и в две высшие (точечные) пары (p4=2). По формуле П.Л. Чебышева: W=3n-2p5-p4 (1), подвижность этого механизма равняется единице (W=1).
 а)
а)
 б)
б)
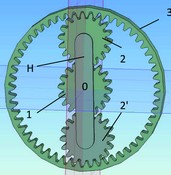
Рисунок 1 – Планетарный механизм
Недостатком описанного механизма является его динамическая неуравновешенность относительно общей геометрической оси 0. Сателлит, обладающий массой m1, вращаясь относительно оси 0, создает переменную по направлению инерционную силу, выводящую весь механизм из равновесия.
Устранение этой неуравновешенности достигается тем, что в механизм (рисунок 1,в) ставят второй сателлит (2'), создающий силу инерции, равную первой, но противоположно ей направленную.
Однако введение второго сателлита существенно меняет подвижность механизма. В этом случае, число звеньев сателлита становится равным 4, число шарниров p5= 4, число пар p4 =4 и подвижность по (1) оказывается равной нулю, т.е. механизм становится неподвижным.
Чтобы такой механизм оказался работоспособным необходимо уменьшить число пар p4 на единицу, а это значит, во втором сателлите обеспечить зазор между зубьями, что на практике и выполняется. Но в этом случае через второй сателлит не может передаваться силовой поток, т.е. надобность во втором сателлите отпадает. Очевидным является техническое решение, когда вместо второго сателлита устанавливается тело (4) массой, равной массе сателлита (рисунок 2)
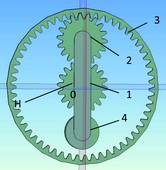
Рисунок 2 – Односателлитный планетарный механизм
и тогда вполне решается задача уравновешивания механизма без потери определенности движения.
Научный руководитель: Дворников Л.Т., д.т.н.