



В работах [1, 2] было предложено при обработке сложных внутренних поверхностей деталей машин применять механизмы второго семейства [3]. Особенность этих механизмов заключается в том, что они функционируют в ограниченном декартовом пространстве и на них накладываются два общих условия связи. Однако относительно одной из осей систем координат они могут воспроизводить винтовое движение, причем такое, при котором ось винтового движения некоторых из точек звеньев оказывается пространственной кривой, описывая в частном случае геликоидальную поверхность.
В настоящей работе обосновывается конструкция (рисунок 1) и принцип действия такого пространственно-геликоидного механизма [4].
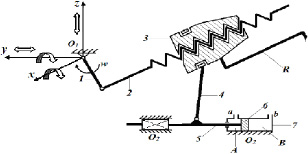
Рисунок 1. Пространственно-геликоидный механизм
Механизм включает в свой состав стойку О1О2, кривошип 1, шатун 2, выполненный в виде винта, гайку 3 (выходное звено), на которой установлен обрабатывающий инструмент R, коромысло 4, опору 5-6, состоящую из штока 5 и поршня 6, образующих единое звено, и гидроцилиндра 7, установленного на стойке О2. Кривошип 1 входит со стойкой О1 во вращательную пару пятого класса р5, шатун 2 входит с кривошипом 1 также во вращательную пару пятого класса р5, гайка 3 образует с винтовым шатуном 2 винтовую пару р5 и с коромыслом 4 вращательную пару пятого класса р5. Опора 5-6 коромысла 4 выполняется подвижной, поступательно движущейся и приводимой в движение подачей жидкости через отверстие а в штоковую полость А или через отверстие b в поршневую полость В, при этом ползун образует с гидроцилиндром 7 поступательную пару пятого класса р5. Всего подвижных звеньев в механизме 5 (n=5), а кинематических пар пятого класса 6 (р5=6). Введя значения для n и р5 в формулу подвижности механизмов второго семейства [3, стр. 87], получим
W=4n-3p5=4∙5-3∙6=20-18=2,
означающее, что механизм обладает двумя степенями свободы и движение в нем должно задаваться одновременно двум входным звеньям.
Движение звеньев этого механизма может быть рассмотрено в пространственной системе координат xyz. Относительно оси х механизм позволяет воспроизводить только вращательное движение, относительно оси у - вращательное и поступательное, а в направлении оси z - только поступательное. Поступательное движение вдоль оси х и вращательное движение вокруг оси z являются невозможными.
Принцип работы пространственно-геликоидного механизма заключается в следующем. При задании независимых движений кривошипу 1 и опоре 5-6 коромысла 4 подачей жидкости через отверстия а или b гидроцилиндра 7, шатун 2 через резьбу заставляет поворачиваться гайку 3 и обрабатывающий инструмент R получает возможность, обрабатывать сложную внутреннюю поверхность деталей машин. Механизм является вполне работоспособным при неподвижном поршне 6.
Научный руководитель: Дворников Л.Т., д.т.н., профессор