


Scientific journal
Advances in current natural sciences
ISSN 1681-7494
"Перечень" ВАК
ИФ РИНЦ = 0,976
THE CHOICE OF MOTOR FOR VACUUM SWITCHGEAR

Автоматизация, повышение производительности и надежности вакуумно-технологического оборудования электронной техники, развитие техники эксперимента, ядерных и космических исследований определили качественно новый уровень требований к исполнительным механизмам и, в частности, к вакуумной коммутационно-регулирующей аппаратуре с электромеханическим приводом [1], состоящим из электродвигателя (ЭД) и передаточного механизма – редуктора.
Важным этапом при проектировании технических объектов является выбор вариантов конструкции из множества конкурирующих.
Выбор типа ЭД осуществляется на этапе технического предложения, анализируя техническое задание на привод [2].
К основным типам ЭД относятся – двигатели постоянного тока: с параллельным, последовательным, смешанным и независимым возбуждением переменного ток; асинхронные с короткозамкнутым и полым ротором; синхронные – реактивные, редукторные и с расщепленными полюсами; универсальные и шаговые [3].
С позиции системного подхода оптимальный выбор ЭД определяется отношениями между типами ЭД и системными характеристиками: функцией ЭД – F, внешней средой, описывающей условия функционирования ЭД – Н3, условия эксплуатации ЭД – Н2, функциональные и экономические требования – Н1, Н4 и свойствами ЭД – Z.
Функция F ЭД характеризует вид и характер движения выходного звена: вращательное, линейное, дискретное, регулируемое и нерегулируемое (f1, f2, f3, f4, f5). К условиям функционирования Н3 относятся такие факторы, как вид среды Н31, температура Н32, влажность Н33, давление Н34, вид соединения ЭД с внешним объектом Н35 (фланцевое Н351, на лапках Н352, специальное Н353), ориентация в пространстве Н36 (ограниченная Н361, неограниченная Н362) и др.
Эксплуатационные требования Н2 содержат: режим работы Н21 (длительный Н211, кратковременный Н212, повторно-кратковременный Н213), характер изменения нагрузки Н22, ресурс Н23, наработку на отказ Н24, ремонтопригодность Н25, безопасность Н26 и др.
Функциональными требованиями Н1 являются: мощность Н11, частота вращения Н12, момент инерции ротора Н13, номинальный крутящий момент Н14, пусковой момент Н15, питание Н16, отношение пускового момента к номинальному Н17, габариты Н18, масса Н19 и др.
К экономическим требованиям Н4 относятся: стоимость Н41, серийность Н42, затраты на эксплуатацию Н43 и др.
Свойства Z ЭД включают: частоту питания – Z1, КПД – Z2, ток статора – Z3, ток возбуждения – Z4, ток якоря – Z5 и др.
На рис. 1 представлен мультиграф связей при выборе ЭД, в котором вершинами являются тип ЭД и обобщенные факторы выбора, а дугами – отношения между ними.
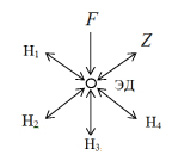
Рис. 1. Мультиграф связей при выборе типа ЭД
Множество типов ЭД – Y находим разбиением признака «способ действия»:
Y = {y1, y2, …, y10}, (1)
где yi (i = 1,2,…,10) – соответственно двигатели постоянного тока с последовательным, параллельным, смешанным и независимым возбуждением; переменного тока асинхронные однофазные, универсальные, трехфазные и тихоходные; синхронные – редукторные и шаговые.
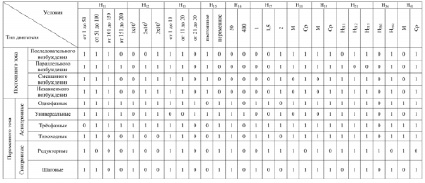
Анализ параметров множества Hi показывает, что существует множество, зачатую противоречивых условий и факторов выбора типов ЭД. Вместе с тем выявлены инвариантные для всех типов ЭД параметры факторов и условий выбора, представленных в табл. 1. Основной задачей при выборе является установление логических зависимостей между типами ЭД и значениями или интервалами значений hi параметров множеств Hi, то есть необходимо найти такое выражение Т, что:
Т: hijs (Hij) → Yp, Yp Y, ⊂ (2)
где i=1,2,3,4, j=1,…,t(i), s=1,…,r(ij), P=1,2,…10.
Формализация выбора типов ЭД осуществлена с помощью таблицы соответствия Т (Н, Y) (табл. 1), в которой параметр Hiy, имеющий r(ij) значений, представляется r(ij) булевскими переменными Xs (s=1,…, r(ij), где Xs (Yp)=1, если Т(hijs)=Yp и Xs (Yp)=0 если Т(hijs)≠Yp.
Выбор типа ЭД осуществляется по исходным данным в техническом задании на электромеханический привод, используя разработанную табл. 1, формализующую процедуру выбора. Под I подразумевается выполнение требования данным типом.
Выбор ЭД возможен при его соответствии заданным градациям условий и факторам выбора.
Таким образом, существуют множество, зачастую противоречивых условий и факторов выбора ЭД, поэтому, важное значение имеет анализ их связей с типами ЭД и взаимосвязей между собой. На основе анализа строят табл. 1, представляющую собой булеву матрицу. По столбцам располагаются условия и критерии выбора, по строкам – типы ЭД. Условия и критерии выбора имеют градации, определение которых является одним из трудоемких процессов в связи с необходимостью максимального уменьшения дублирования исходных данных и обеспечения их полноты. Затем в таблице устанавливают логические зависимости между условиями и критериями выбора и типами ЭД: в случае соответствия типа ЭД и градации критерия на пересечении i-го столбца и j-й строки ставится «1» (истина), иначе – «0» (ложь).
Выбор ЭД по значениям параметров его свойств дает некоторое множество ЭД, удовлетворяющих этим значениям, поэтому необходимо провести параметрический анализ, позволяющий определить наилучший ЭД среди всех, удовлетворяющий ТЗ.
Таблица 1
В качестве интегрального критерия выбора примем функцию расстояния пространственных критериев:
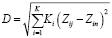 , (3)
, (3)
где Ki – коэффициент весомости i-го параметра, показателя качества; Zij – нормирование значение показателя качества Hi варианта ЭД с индексом j; Zin – нормированное значение показателя качества Hi гипотетической идеальной параметрической модели ЭД. Минимальное значение критерия D соответствует наилучшему ЭД.
Аналогичным образом осуществляется формализация выбора типа редуктора на основе разработанной табл. 2.
Таблица 2
|
Вид передачи |
Передаточное число К.п.д. одной ступени |
Относительный габарит |
Относительная масса |
Относительная стоимость |
|||||||||||
|
2÷4 |
4÷6 |
6÷8 |
10÷50 |
50÷100 |
100÷2000 |
0,4÷0,5 |
0,5÷0,6 |
0,6÷0,7 |
0,7÷0,8 |
0,8÷0,9 |
0,9÷0,96 |
||||
|
Цилиндрическая |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
|
Коническая |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
2 |
1,2 |
1,3 |
|
Планетарная |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0,7 |
0,9 |
1,3 |
|
Червячная |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1,2 |
1,04 |
1,7 |
|
Волновая |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0,8 |
1,1 |
1,8 |
На основе системной модели ЭМП предложен метод формализации выбора ЭД и типа редуктора, с помощью которого определяют удовлетворяющие требованиям ТЗ электродвигатели и редукторы из их множества.
Библиографическая ссылка
Ивашов Е.Н., Панфилова Е.С., Шихов А.И. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ВАКУУМНОЙ КОММУТАЦИОННОЙ АППАРАТУРЫ // Успехи современного естествознания. 2014. № 12-4. С. 409-411;URL: https://natural-sciences.ru/en/article/view?id=34622 (дата обращения: 23.06.2026).