


Scientific journal
Advances in current natural sciences
ISSN 1681-7494
"Перечень" ВАК
ИФ РИНЦ = 0,976
PROGRAM FOR THE BOTTOM OF THE DRILL BIT CONTROLLED MOVEMENT ANAGEMENT SIMULATION THAT TAKING IN ACCOUNT NON-CONTROLLED FACTORS

В настоящее время существенно увеличилась потребность в горизонтально-направленном бурении – в строительстве сложных трехмерных (3D) горизонтальных скважин с большими отходами от вертикали [1]. Однако сложные профили горизонтальных скважин являются причиной недохождения нагрузки до долота при бурении; при больших отходах от вертикали наблюдается неравномерное вращение компоновки низа буровой колонки (КНБК), что приводит к неуправляемости КНБК и прекращению бурения. В связи с этим повышение сложности условий добычи нефти и газа, труднодоступность разрабатываемых месторождений, увеличение глубины залегания продуктивных пластов приводят к необходимости комплексной автоматизации процессов бурения нефтегазовых скважин, разработки и внедрения новых образцов забойной аппаратуры, телеизмерительных и управляющих систем, основанных на применении современных достижений в данных областях [2].
В исследованиях, направленных на управление процессом бурения, затрагиваются различные процессы моделирования, в особенности управление движением КНБК по заданной траектории [3, 4]. Вместе с тем предлагаемые методы управления бурением не позволяют в полной мере использовать возможности перспективных КНБК. В то же время проведенный нами ранее анализ возможностей моделирования, способного отражать направление движения бурового инструмента одновременно по зенитному углу и азимуту [5], показал возможность разработки программы, реализующей данные требования.
Цель исследования: разработка программы, реализующей возможность моделирования направления движения бурового инструмента одновременно по зенитному углу и азимуту и оценка ее практической применимости.
Материалы и методы исследования
Для того чтобы КНБК, как объект управления, выполнял свои функции, необходимо решить две задачи. Первая задача заключается в определении его номинальной траектории движения. С математической точки зрения данная задача состоит в описании программы управления (задача программирования управления).
Вторая задача заключается в формировании закона управления КНБК. Под законом управления в данном случае понимается зависимость управляющих воздействий от тех параметров, которые доступны измерению в процессе движения в любой (текущий) момент. Решение этой задачи позволяет сформировать (синтезировать) структуру системы управления КНБК, работающей по принципу обратной связи (задача синтеза управления).
При решении как задачи программирования, так и задачи синтеза управления необходимо иметь в виду, что на буровую колонну в целом и КНБК в процессе продвижения в скважине действуют различные возмущения, без учета которых нельзя обойтись. Характерным примером является задача управления конечным состоянием КНБК, когда требуется осуществить её выведение в требуемый район назначения с заданной точностью. При этом возможны случаи, когда решение той или иной задачи без учета возмущений вообще не может обеспечить требуемой точности управления. Поэтому при формировании, как программы, так и закона управления КНБК, как правило, следует учитывать действие неконтролируемых факторов. При этом следует рассматривать две группы факторов. Первая группа представляет собой факторы, свойственные всем задачам управления движением объектов (летательные аппараты, роботы, манипуляторы и т.п.). Вторая группа описывает факторы, свойственные именно конкретному управляемому объекту, такие как ошибки задания условий внешней среды, ошибки при расчёте управляющих воздействий и погрешности решения задачи навигации. Кратко рассмотрим эти факторы.
Ошибки задания условий внешней среды. При расчёте программного движения используются данные о внешней среде, в которой движется объект управления. В данном случае – это свойства соответствующих горных пород. В действительности параметры среды отличаются от параметров, задаваемых при расчёте программной траектории. Это приводит к отклонению реального положения КНБК от расчетного положения.
Ошибки при расчёте управляющих воздействий. Для реализации программного движения рассчитываются управляющие воздействия, позволяющих направлять КНБК по программной траектории путём использования силовых и управляющих устройств (нагрузка на крюке, поворот буровой колонны вокруг ее оси и радиус кривизны отклоняющего устройства). При этом при расчёте управляющих воздействий используются некоторые математические модели, неизбежно содержащие методологические ошибки, погрешности реализации, округления и т.п. Компенсация этих факторов требует разработки более точных, часто громоздких и трудно реализуемых практически моделей.
Кроме того, при расчёте программного движения используются также данные о самом объекте управления, в данном случае буровой колонне и КНБК, представляющие собой массово-геометрические, силовые и др. характеристики. Эти данные также содержат погрешности, связанные с их заданием и реализацией.
Погрешности решения задачи навигации. Частичная компенсация отклонений КНБК от программной траектории принципиально возможна путём сокращения рассмотренных выше ошибок и погрешностей. Однако на практике данная компенсация сильно осложнена как технологическими, так и экономическими обстоятельствами. Обычно соответствующие мероприятия трудно реализуемы либо очень дороги.
На практике компенсация данных отклонений осуществляется на основе решения задачи навигации, состоящей в определении текущих параметров движения КНБК (времени, координат, скоростей, их комбинаций). Параметры определяются на основе показаний соответствующих приборов (инклинометров, акселерометров, гироскопов, магнитных компасов, акустических датчиков положения и др.) пластов [2]. В показаниях данных приборов также содержатся инструментальные ошибки. При рассмотрении движения КНБК выявляется и присущий одновременно с вышеупомянутыми проявлениями фактор, связанный с упругим закручиванием буровой колонны вокруг ее оси. Следовательно, при разработке имитационной модели, описывающей процесс бурения, важно также учитывать и то, что буровая колонна, имеющая большую длину и нагруженная осевым сжатием, может потерять устойчивость и начать упираться в стенки ствола шахты.
На рис. 1 приведена блок-схема программной реализации имитационной модели управления траекторией движения компоновки низа буровой колонны с учётом существующих неконтролируемых факторов, а на рис. 2 приведены скриншоты ее интерфейса.

Рис. 1. Блок-схема компьютерной программы имитации управляемого бурения
А Б
В
Г Д
Рис. 2. Скриншоты работы программы. А – запрос о создании рабочей директории; Б – информация об успешном создании рабочей директории; В – инструкция по работе с программой; Г – информация об отсутствии необходимого файла данных; Д – информация об успешном завершении работы программы
Разработанная нами в соответствии с этой блок-схемой программа имитационной модели управления траекторией движения компоновки низа буровой колонны с учётом существующих неконтролируемых факторов «Наклонное бурение» устанавливается в директорию «Bur_1», содержащую изначально исполняемый файл «Bur_1.exe», файл «Инструкция по программе.txt» и поддиректорию «Образцы файлов», в которой находятся типовые файлы, облегчающие обучение и начало работы с программой.
При программировании использовались только функции самой операционной системы Windows – Win32 API. Отладка и компиляция исполняемого файла проводились Microsoft Visual Studio 2013 C++ Redistributable x64/86, причем встроенные в транслятор библиотеки классов не использовались. Таким образом, дальнейшее развитие программы может проводиться с использованием любого транслятора C++ для Win32, независимо от его версии и фирмы-производителя.
При первом запуске программы появится сообщение (рис. 2, А), а после положительного ответа появится сообщение об успешном создании рабочей директории (рис. 2, Б), затем откроется файл инструкции по работе с программой (рис. 2, В). В случае же отрицательного ответа программа завершает работу.
При запуске программы для расчетов в поддиректории «Расчет скважины» должны находиться вспомогательные текстовые файлы с исходными данными по расчету планируемой скважины и параметрам месторождения. В том случае, если программа успешно открывает эти файлы и считывает из них информацию, заполняются соответствующие структуры программы и начинается ее содержательная расчетная часть. Если же часть необходимых файлов отсутствует, то появляются соответствующие предупреждения (рис. 2, Г) и программа завершает работу.
В случае наличия всех необходимых для работы файлов программа в рабочем режиме расчетов вначале считывает файл «Плановая скважина.txt», затем файлы «Структура месторождения.txt», «План проходки.txt», «Пробуренный участок.txt» и «Случайные факторы.txt» и заносит данные в поля соответствующих классов. Далее программа в простейшем случае автоматически проводит расчеты, записывает результаты в выходной файл «Отчет о расчете.txt» и выдает извещение об окончании работы (рис. 2, Д).
Таким образом, разработанная компьютерная программа с открытой архитектурой иллюстрирует работоспособную версию основного интерфейса с некоторыми важными расчетными функциями, пригодную для модификации в случае необходимости решения сколь угодно сложных задач, связанных с особенностями бурения скважины.
Результаты исследования и их обсуждение
В настоящее время программа позволяет оценивать планируемую нагрузку на крюке, соответствующую заданному усилию подачи на забой с учетом трения бурильной колонны по стенкам скважины. Кроме того, заложенные в программе структуры позволяют решать и более сложные задачи, возникающие при движении КНБК в реальной породе. В реализованном варианте программа рассчитывает планируемый вес на крюке в зависимости от длины спущенной в скважину бурильной колонны.
Для упрощения расчетов плотность материала трубы принята равной 7,8×103 [кг/м3]. Плотность бурового раствора принята равной 1,1×103 [кг/м3], т.е.  примем равным 0,86, что видимо, является достаточно точной оценкой. Следовательно, для трубы диаметром 127 мм со стенкой 10 мм погонная масса составит 57,3 [кг/м], а для утяжеленной бурильной трубы с внутренним диаметром 45 мм погонная масса составит 173 [кг/м] (участок длиной 36 м весит 6,2 т). Будем считать, что
примем равным 0,86, что видимо, является достаточно точной оценкой. Следовательно, для трубы диаметром 127 мм со стенкой 10 мм погонная масса составит 57,3 [кг/м], а для утяжеленной бурильной трубы с внутренним диаметром 45 мм погонная масса составит 173 [кг/м] (участок длиной 36 м весит 6,2 т). Будем считать, что  равно 483 [Н/м].
равно 483 [Н/м].
Тогда выведенное нами ранее в работах [5–7] уравнение

можно анализировать, проинтегрировав его от устья скважины до заданной длины буровой колонны дважды – положив у устья скважины Т = Т0 равным нулю и Т = Т1 равным, например, 1 кН. Тогда для любой величины Тx = Тx(s) в [кН] в конце скважины, пробуренной на заданную длину s, мы находим значения Т0(s) и Т1(s). В этом случае около устья скважины следует положить Т(Тx) = Т1(Тx(s) – Т0(s))/Т1(s) – Т0(s)), где сила выражена в [кН]. А участок утяжеленных буровых труб длиной 36 м, имеющий избыточный вес по сравнению с обычными трубами 4,1 т, а также вес КНБК (около 10 т) при расчетах учитывается как сосредоточенная масса, скользящая в соответствии с зенитным углом скважины под действием силы тяжести и коэффициента трения. В результате мы можем выразить как зависимость усилия подачи на забой от веса на крюке, так и наоборот – зависимость веса на крюке от требуемого усилия подачи на забой.
Анализируя отклонение параметров уже пробуренного участка скважины от запланированного профиля, программа рассчитывает необходимые управляющие воздействия для возвращения дальнейшего профиля скважины к проектному профилю. Программа имеет открытую архитектуру и легко может быть дополнена необходимыми для специальных расчетов модулями.
Работа программы была протестирована с использованием данных реального месторождения, предоставленных Ассоциацией буровых подрядчиков [8] (данные не приводятся). При этом было проведено сравнение результатов тестирования с результатами расчетов, полученными по методике ВНИИБТ [9]. Как видно из рис. 3, результаты расчета с использованием данного уравнения намного более точно соответствуют реальным данным веса на крюке (непрерывная линия), чем результаты расчетов, проведенные по методике ВНИИБТ.
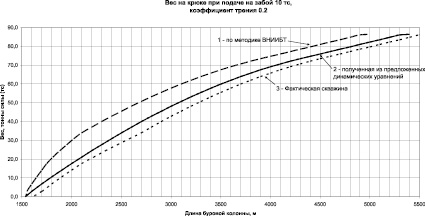
Рис. 3. Планируемый вес на крюке в зависимости от длины спущенной в скважину колонны буровых труб при подаче на забой 10 тс и коэффициенте трения 0,2: верхняя пунктирная – результаты расчетов по методике ВНИИБТ, непрерывная линия – данные для реальной скважины, нижняя пунктирная – результаты расчета программы «Бурение»
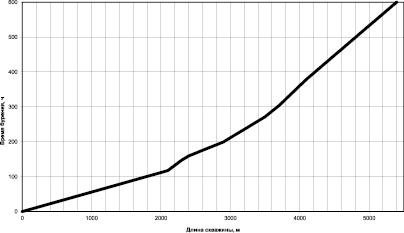
Рис. 4. Планируемое время работы буровой установки в зависимости от длины введенной в скважину буровой колонны. (Типичное поведение с учетом свойств слоев)
Затем, используя данные о структуре месторождения, программа рассчитывает планируемое время работы в зависимости от длины спущенной в скважину колонны буровых труб. На рис. 4 приведены результаты таких расчетов планируемого времени работы буровой установки для реального месторождения.
Заключение
Таким образом, разработанная компьютерная программа с открытой архитектурой иллюстрирует работоспособную версию основного интерфейса с некоторыми важными расчетными функциями, пригодную для модификации в случае усложнения решаемых задач, связанных с особенностями бурения скважины. В настоящее время программа позволяет оценивать планируемую нагрузку на крюке, соответствующую заданному усилию подачи на забой с учетом трения бурильной колонны по стенкам скважины. Кроме того, заложенные в программе структуры позволяют решать и более сложные задачи, возникающие при движении КНБК в реальной породе.
Полученные при работе программы результаты позволяют сделать вывод об адекватности математической и имитационной моделей движения КНБК реальным ситуациям бурения.
Библиографическая ссылка
Иванов Р.О., Лушпей В.П., Панков М.Е. ПРОГРАММА ДЛЯ МОДЕЛИРОВАНИЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОМПОНОВКИ НИЗА БУРОВОЙ КОЛОНКИ С УЧЕТОМ НЕКОНТРОЛИРУЕМЫХ ФАКТОРОВ // Успехи современного естествознания. 2018. № 7. С. 129-135;URL: https://natural-sciences.ru/en/article/view?id=36815 (дата обращения: 02.08.2026).