


Scientific journal
Advances in current natural sciences
ISSN 1681-7494
"Перечень" ВАК
ИФ РИНЦ = 0,976
PROSPECTS FOR USING MODERN ROBOTICS IN PRECISION AGRICULTURE

Введение
Современные IT-тренды, такие как использование больших данных, интернета вещей (IoT), роботизированных технологий и искусственного интеллекта (AI), открывают новые возможности для повышения эффективности и устойчивости развития агропромышленного комплекса (АПК). В распоряжении Правительства РФ [1] выделены следующие основные проблемы текущего состояния сельскохозяйственной отрасли, решаемые с помощью цифровизации: высокий уровень дефицита на рынке труда специалистов в сфере АПК; недостаточное развитие цифровой инфраструктуры; отсутствие единой цифровой площадки получения отраслевых данных; недостаточная точность данных в АПК; высокая капиталоемкость мероприятий цифровой трансформации АПК.
В соответствии с Распоряжением в ходе реализации Стратегического направления в АПК, в том числе в сельском хозяйстве, должны быть внедрены следующие технологии для повышения эффективности производственных процессов сельхозпредприятий: беспилотная сельскохозяйственная техника и робототехника; искусственный интеллект, в том числе машинное обучение, компьютерное зрение; интернет вещей; спутниковые системы связи и позиционирования и т. д. Целями цифровой трансформации АПК являются достижение продовольственной безопасности, повышение эффективности производственных процессов в АПК. Установлено, что самыми востребованными сервисами цифровизации у сельхозтоваропроизводителей являются инструменты точного земледелия и точного животноводства.
В условиях цифровизации и технологического обновления сельхозпредприятий особую актуальность приобретает внедрение интеллектуальных систем управления сельскохозяйственной техникой [2–4]. Для повышения эффективности проведения сельскохозяйственных работ в России и за рубежом появляются технические решения в форме мобильных роботизированных платформ – агророботов, способных перемещаться и выполнять различные сельскохозяйственные задачи в соответствии с технологией точного земледелия либо автономно, либо при дистанционном управлении [5–6]. Такие технические решения способны значительно повысить эффективность сельхозпроизводства за счет автоматизации рутинных и трудоемких агротехнических операций, таких как посев семян, анализ состояния посевов и почвы, выявление болезней, оценка урожайности, внесение удобрений по технологии точного земледелия, обработка от вредителей, уничтожение сорняков различными методами, сбор и транспортировка урожая. Это позволит обеспечить снижение затрат (трудозатраты, расход удобрений) и минимизировать воздействие на окружающую среду (сокращение пестицидов, экономия воды) [7, 8]. Таким образом, развитие и внедрение агророботов полностью соответствует стратегическим целям, обсуждаемым на федеральном и региональном уровнях управления АПК.
Цель исследования – систематизация и анализ существующих разработок агророботов, созданных российскими и зарубежными компаниями для применения в точном земледелии.
Материалы и методы исследования
Одним из ведущих отечественных разработчиков в данной области является компания Cognitive Pilot (https://cognitivepilot.com/), специализирующаяся на создании систем автономного вождения на базе искусственного интеллекта. Компанией разработана интеллектуальная система Cognitive Agro Pilot, предназначенная для автоматизированного управления (автопилотирования) сельскохозяйственными машинами (зерноуборочными и кормоуборочными комбайнами, тракторами, опрыскивателями) в средних и крупных агропромышленных комплексах (от 1000 га).
Компанией Avrora Robotics (https://avrora-robotics.com/ru/) и Рязанским государственным радиотехническим университетом разрабатывается проект «АгроБот» (https://avrora-robotics.com/ru/projects/agrobot/), представляющий собой системы беспилотного управления для сельскохозяйственной техники и линейку сельхозмашин, предназначенных для автоматизации различных агротехнических операций; в рамках проекта также разработан колесный беспилотный роботрактор.
Резидент «Сколково» компания «Гумич РТК» разрабатывает наземные сельскохозяйственные роботы «Агробот» (https://gumich-rtk.ru/roboty/agrobot/) на гусеничной платформе разных габаритов, позволяющие менять функционал путем установки различных навесных модулей для мониторинга, опрыскивания, перевозки грузов, зарядки дронов и т. д.
В области интеллектуального управления агророботами в России появляются патенты, связанные с разработкой мобильных робототехнических платформ систем автономного управления сельхозтехникой, в том числе на основе данных компьютерного зрения, – например «Робот-пропольщик с функцией фертигации», № 2694588, 2019 г., ФГБОУ ВО «Волгоградский ГАУ»; «Беспилотный робот-пропольщик», № 2766888, 2021 г., ФГБОУ ВО «Ставропольский государственный аграрный университет».
Современные решения в области разработки автономных мобильных робототехнических платформ
|
Платформа |
Краткая характеристика |
Масштаб применения |
Особенности функционала |
Стоимость |
|
Cognitive Agro Pilot |
Интегрируется с существующей сельхозтехникой |
Большие поля, крупные сельхозпредприятия |
Позволяет автоматизировать существующий парк техники, повышает эффективность |
3–5 млн руб. |
|
«АгроБот» Avrora Robotics |
Электрический, на колесном шасси, с высоким клиренсом |
Средние и большие поля, универсальное применение |
Высокая проходимость, модульность |
5–15 млн руб. |
|
«Гумич РТК» |
Электрический /дизельный, гусеничное шасси |
Большие поля, крупные сельхозпредприятия |
Высокая точность вождения, простота в установке, повышение производительности техники |
1–4 млн руб. |
|
Naïo Technologies |
Электрический (аккумуляторные батареи), колесное шасси |
Малые и средние поля, овощеводство, виноградники |
Экологичность, снижение трудозатрат, бережное отношение к почве |
7–15 млн руб. |
|
FarmDroid |
Электрический (солнечные батареи), легкое колесное шасси |
Малые и средние поля, овощеводство, сахарная свекла |
Использует солнечную энергию, очень легкий, работает без оператора, очень точный посев и прополка, отсутствие химии |
6–8 млн руб. |
|
Carbon Robotics (LaserWeeder) |
Электрический (аккумуляторные батареи), колесное шасси |
От малых роботизированных систем до управления техникой на полях среднего размера |
Отсутствие гербицидов, избирательность, высокая скорость работы, снижение затрат на прополку, эффективность |
15–20 млн руб. |
Примечание: составлена авторами на основе данных, полученных в ходе исследования.
Активно развиваются зарубежные разработки мобильных агротехнических роботизированных платформ с широким спектром навесного оборудования для реализации технологии точного земледелия [9–11]. Например, французская компания Naïo Technologies (https://www.naio-technologies.com/en/home/) разрабатывает целую линейку «легких» и «тяжелых» роботов с универсальными держателями различных инструментов (в том числе для удаления сорняков); датская компания FarmDroid (https://farmdroid.com/) разрабатывает многоцелевые (прополочно-посевные) агроэлектрические роботы FarmDroid FD20, которые осуществляют как посев, так и междурядную и внутрирядную механическую прополку с высокой точностью; американская компания Carbon Robotics (https://carbonrobotics.com/) – автономный комбайн Carbon Robotics LaserWeeder с использованием лазеров для уничтожения сорняков.
В таблице представлена сводная информация по результатам проведенного анализа современных решений в области разработки автономных мобильных робототехнических платформ.
Результаты исследования и их обсуждение
Для замены ручного труда производителями в России и за рубежом разрабатываются агророботы с автономным движением на основе интеллектуального управления, которые включают: мобильную платформу; программно-аппаратный комплекс (ПАК), состоящий из программного обеспечения и аппаратной части; подсистему интеллектуального управления автономным движением агроробота; подсистему управления позиционированием дополнительных устройств (навесного оборудования); подсистему компьютерного зрения.
Программное обеспечение ПАК включает в себя алгоритмы, интерфейсы, управляющие модули:
– операционную систему для роботов ROS (Robot Operating Systems)/ROS2;
– алгоритмы и фреймворки компьютерного зрения OpenCV – для обработки изображений и видео, TensorFlow, PyTorch, Keras – для обучения нейросетей, CNN – для распознавания и классификации изображений;
– навигационные системы SLAM (Simultaneous Localization and Mapping) – алгоритмы, позволяющие роботу одновременно строить карты неизвестной окружающей среды и определять свое местоположение на местности;
– подсистемы управления и контроля, такие как программное обеспечение для программирования промышленных контроллеров, отвечающих за низкоуровневое управление двигателями; программное обеспечение для микроконтроллеров, а также для систем безопасности;
– операторский интерфейс HMI (Human-Machine Interface).
Аппаратную часть составляют RGB, мультиспектральные, инфракрасные камеры, датчики расстояния (лидары) для измерения расстояний до объектов, GPS/ГЛОНАСС-приемники для определения местоположения робота в поле, инерциальные измерительные блоки для измерения угловой скорости, ускорения и ориентации (тангаж, крен) робота, датчики для мониторинга растений, почвы, встраиваемые вычислительные контроллеры, программируемые логические контроллеры, микроконтроллеры, контроллеры движения, системы управления питанием, модули беспроводной связи.
Подсистема интеллектуального управления автономным движением агроробота разрабатывается для перемещения по рельефной местности с возможностью дистанционного управления, преодоления или обхода препятствий и адаптации к меняющимся условиям (без прямого участия человека). Для определения текущего положения робота, навигации, планирования оптимальных маршрутов, идентификации препятствий используются алгоритмы искусственного интеллекта и машинного обучения.
Подсистема управления позиционированием дополнительных устройств относится к точному управлению навесным оборудованием (например, опрыскивателем для точного внесения удобрений, дозатором для внесения энтомофагов, лазером для прополки) и осуществляется за счет использования методов AI-распознавания.
Подсистема компьютерного зрения, предназначенная для распознавания растений, позволяет агророботу «понимать» окружающую среду, что особенно важно для решения задач идентификации растений (сорняки/культурное растение), обнаружения болезней, вредителей, для обнаружения препятствий. Данная подсистема разрабатывается с помощью моделей нейросетевой классификации, построенных на основе мониторинга и сбора данных с лидаров, датчиков, камер.
К сожалению, в настоящее время практически все сельхозпредприятия для повышения своей экономической эффективности используют химические средства обработки и защиты растений, которые могут накапливаться в сельхозпродукции и негативно влиять на экологическое состояние окружающей среды, здоровье людей и животных. Для снижения пестицидной нагрузки и производства экологической продукции используются технологии органического земледелия, основанные на применении биопрепаратов; при этом для уничтожения сорняков традиционно используется ручная или механизированная прополка, которая является наиболее экологически безопасной, но очень трудоемкой операцией.
В условиях стремительной модернизации сельскохозяйственной отрасли актуальным и перспективным направлением является разработка агророботов, которые интегрируют интеллектуальные технологии прополки и распознавания растений; такие роботы предназначены для реализации принципов органического земледелия и позволят сельхозпредприятиям выпускать экологически чистую продукцию [12]. На рисунке представлены основные способы уничтожения сорняков с помощью интеллектуальных агророботов (все изображения находятся в открытом доступе) [13].
Лазерная прополка уничтожает сорняки лазерными лучами с использованием лазерного оборудования [14, 15]. Направленный на сорняки лазерный луч нагревает растительную ткань, что приводит к повреждению или гибели растения. Воздействие лазеров на сорняки зависит от оптической мощности, времени воздействия, размера пятна и длины волны λ лазера. Различают «синие» диодные лазеры (λ = 400–500 нм) и «красные» лазеры на углекислом газе (СО2) (λ = 650–660 нм). Эффективность прополок диодными лазерными системами обусловлена высоким поглощением длины волны лазера на целлюлозе и хлорофилле растения, используемого в кислородном фотосинтезе. Прополка синим лазером требует более низкой оптической мощности для эффективного удаления нежелательных растений. При борьбе с сорняками «красным» лазером CO2 процесс прополки похож на эффект электрических и термических прополочных устройств, при котором растение обезвоживается или кипит заживо.
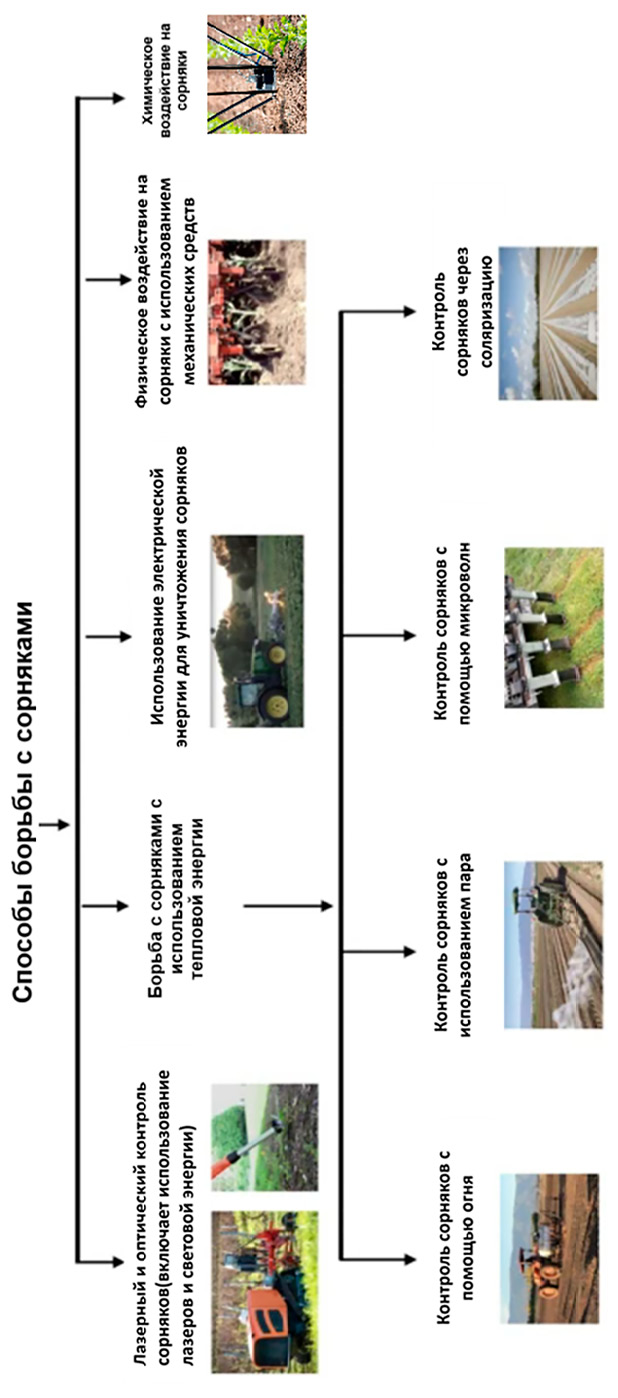
Способы борьбы с сорняками Примечание: составлен авторами на основе источника [13]
Это связано с тем, что лазеры CO2 очень сильно поглощают воду и практически не могут проходить сквозь нее, не испаряя ее. К сожалению, лазеры CO2 тратят 95 % поставляемой электроэнергии в виде тепла и требуют, чтобы это тепло обрабатывалось надежными системами охлаждения.
Способ борьбы с использованием тепловой энергии использует прямое внешнее интенсивное тепло для уничтожения сорняков от пламени, горячего пара, масла, микроволн, солнца. Тепло передается через сорняк, вызывая обезвоживание растения и разрыв клеточной стенки, что влечет увядание растения за время от нескольких часов до нескольких дней. Такая обработка может потребовать многократного применения, поскольку корни сорняков могут побудить рост новых стеблей. Термическая прополка, удаляя сорняки, уничтожает также бактерии и насекомых, не различая вредных и полезных.
Интеллектуальная механическая прополка позволяет выделять среди зеленой массы растений сорняки и управлять механическими приводами прополочных устройств для удаления сорняков не только в междурядьях, но и внутри рядов.
Способ химической прополки – это удаление сорняков с помощью гербицидов, которые вызывают увядание и гибель сорняков: воздействуют на дыхание, фотосинтез, рост или подавляют прорастание семян. Интеллектуальная химическая прополка использует технологии машинного зрения для обнаружения сорных и культурных растений. Точечное опрыскивание реализуется следующим образом: при движении робота размещенные на опрыскивателях датчики сканируют растения, в режиме реального времени происходит распознавание сорняков; форсунки распыляют строго заданное количество химического раствора в точно определенном месте. Данная технология имеет высокую эффективность прополки за счет резкого сокращения затрат на гербициды.
Электрическая прополка – это процесс уничтожения клеток растений короткими импульсами электричества высокого напряжения; для полного удаления сорняков требуется большое время контакта со стеблями, листьями или корнями; для полного уничтожения сорняков применяется технология импульсного электрического микрошока, основанная на методах искусственного интеллекта, со сверхнизким потреблением энергии.
Заключение
Обзор современных технических решений в области агроробототехники показал, что на российском рынке в последнее время появились технологии автономного движения сельхозтехники и автоматического управления агротехническими операциями, однако в основном рассчитанные на использование в крупных агрохолдингах. При этом существующие зарубежные аналоги на российском рынке либо недоступны, либо дороги. В связи с этим количество и разнообразие реализованных технических решений не в полной мере охватывает необходимые потребности сельхозпредприятий РФ, имеется востребованность отечественных разработок в этой области. Разнообразное навесное оборудование мобильных роботизированных платформ позволяет решать различные проблемы точного земледелия. Особое внимание следует уделять важной задаче борьбы с сорняками, поскольку именно на этапе развития зеленой массы аграрных культур обеспечивается их урожайность. Каждый из методов прополки сорняков с помощью интеллектуальных роботов, приведенных в настоящем обзоре, имеет специфику, которую важно учитывать при практическом применении. Дальнейшее развитие агроробототехники, совершенствование ее технологий позволит сделать такие подходы экономически оправданными и экологически безопасными.
Conflict of interest
Financing
Библиографическая ссылка
Габдуллина Э.Р., Саитова Г.А., Сильнова С.В. ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ СОВРЕМЕННОЙ РОБОТОТЕХНИКИ В ТОЧНОМ ЗЕМЛЕДЕЛИИ // Успехи современного естествознания. 2026. № 2. С. 8-14;URL: https://natural-sciences.ru/en/article/view?id=38473 (дата обращения: 22.07.2026).
DOI: https://doi.org/10.17513/use.38473