


Scientific journal
Advances in current natural sciences
ISSN 1681-7494
"Перечень" ВАК
ИФ РИНЦ = 0,976
IMPROVING THE ACCURACY OF GEO-TAGGING AERIAL PHOTOGRAPHS FROM UNMANNED AERIAL VEHICLES USING GLOBAL NAVIGATION SATELLITE SYSTEM BASE STATIONS

Введение
Беспилотные летательные аппараты (БПЛА) прочно закрепились в современных геодезических, картографических и инженерных изысканиях [1]. Возможность быстрого получения пространственных данных высокого разрешения при минимальных затратах делает дроны незаменимым инструментом для решения широкого спектра прикладных задач [2, 3].
Одним из ключевых методов является топографическая съемка с использованием цифровой фотограмметрии. Эта техника позволяет создавать подробные, скорректированные фотограмметрические карты, цифровые модели рельефа и 3D-модели местности с высокой точностью и скоростью. Основным техническим принципом здесь является стереоскопическая фотограмметрия, которая основана на обработке пар перекрывающихся стереоскопических изображений, позволяющих измерять горизонтальные и вертикальные координаты объектов [4].
Традиционный процесс создания карт на основе данных аэрофотосъемки включал в себя трудоемкий этап создания базы данных съемки (полевое картирование – местоположения с известными координатами). В данной статье предлагается отказаться от традиционного полевого подхода к картографированию. Вместо этого авторы рекомендуют использовать данные с бортовой GNSS-станции дрона и файлы RINEX, полученные от сети базовых станций. Интегрированная обработка с использованием технологии постобработки (Post-Processing Kinematic – PPK) позволяет напрямую определять высокоточные координаты центров проекций каждого изображения, что значительно упрощает и ускоряет весь рабочий процесс [5–7].
Цель исследования – разработка и оценка новых методов повышения точности координатной привязки аэрофотоснимков, полученных с помощью беспилотных летательных аппаратов в условиях отсутствия на земле опорных точек.
Материалы и методы исследования
Данная методика основывается на использовании информации, поступающей от локальных сетей постоянных станций глобальной навигационной спутниковой системы (ГНСС) [8–10]. При создании ортофотопланов и цифровых моделей местности была оценена точность результатов для трех сценариев в условиях отсутствия опорных точек на местности. Первый сценарий: расстояние от беспилотного летательного аппарата (БПЛА) до базового приемника, установленного на геодезическом пункте, не превышало 500 м. Второй сценарий: расстояние от БПЛА до ближайшей базовой станции спутниковой сети не превышало 30 км. Третий сценарий: расстояние от БПЛА до ближайшей базовой станции сети составляло более 70 км. По итогам оценки был проведен анализ точности для каждого сценария, а также выполнен сравнительный анализ с альтернативным методом.
Для решения поставленных задач в работе использованы данные двух типов:
Аэрофотосъемочные данные, полученные с помощью БПЛА Autel EVO II Pro 6K [11] (рис. 1). Ключевыми характеристиками для задач фотограмметрического моделирования являются: Фотокамера: 1-дюймовый 20-мегапиксельный CMOS-датчик Sony, обеспечивающий съемку с разрешением до 6K. Навигационная и вспомогательная системы: Бортовая система включает 12 визуальных датчиков для обзора на 360°, что позволяет осуществлять построение карт в режиме реального времени и повышает безопасность полетов, а также интегрированный ГНСС-приемник. Опорное геодезическое обеспечение: для точной геопривязки снимков использовались данные от пары ГНСС-приемников GPS Fora 1, работавших в качестве базовых станций.
Геодезические измерения, выполненные с использованием ГНСС-оборудования (приемники модели GPS Fora 1) [12] (рис. 2).

Рис. 1. Беспилотный летательный аппарат (типа Autel Evo II Pro) Примечание: составлен авторами по источнику: URL: https://geospb.ru/p/geodezicheskaya-modernizacziya-geobox-fora-ppk-l1l2-drone-upgrade (дата обращения: 02.01.2026)

Рис. 2. Дифференциальная система GPS Fora 1 и Fora Lux Примечание: составлен авторами по источнику: URL: https://geospb.ru/p/gnss-priemnik-geobox-fora-lux/ (дата обращения: 02.01.2026)
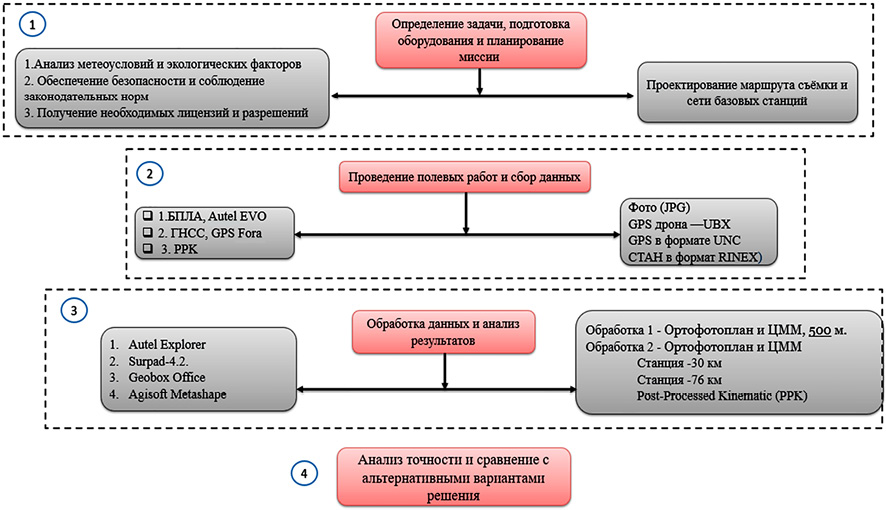
Рис. 3. Порядок исследования Примечание: составлен автором по результатам данного исследования
Исследование проводилось с использованием следующего программного обеспечения: Autel Explorer – для планирования и управления полетами БПЛА Autel Evo II Pro; Surpad 4.2 – для обработки данных с ГНСС-приемников Fora 1 и Fora Lux; Geobox Office (UAV) – для высокоточной постобработки маршрутов БПЛА на основе данных с базовой станции ГНСС; Agisoft Metashape – для обработки изображений и создания конечных продуктов: ортофотопланов, цифровых моделей рельефа (ЦМР) и цифровых моделей местности (ЦММ).
Порядок исследования
Исследование выполнялось по стандартной для геодезических задач трехэтапной методологии (рис. 3).
Подготовительный этап. Этот этап включал в себя идентификацию цели, подготовку оборудования (БПЛА Autel Evo II Pro и ГНСС-приемники Fora), планирование миссии, анализ местности и окружающей среды, а также получение необходимых разрешений в соответствии с требованиями безопасности и законодательства [1, 13].
Результаты исследования и их обсуждение
На втором этапе проводятся полевые работы и сбор данных, на этапе полевых работ были сделаны аэрофотоснимки и собраны первичные данные. Параметры полетной миссии были разработаны с использованием программного обеспечения Autel Explorer (рис. 4).
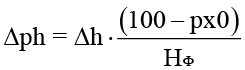
При создании миссии были определены следующие основные параметры, определяющие качество и полноту охвата: разрешение изображения (Ground Sample Distance – GSD), целевой размер пикселя на местности; высота фотографирования рассчитывается математически на основе заданного разрешения изображения на местности и характеристик камеры; перекрытия – продольное (px %) и поперечное (py %); базисы фотографирования – продольный (Bx) и поперечный (By); количество маршрутов, временной интервал между изображениями и количество снимков в маршруте [14].
Расчетная высота фотографирования Нф:
НФ = 2R∙GSD∙(fк/δ), (1)
где НФ – высота фотографирования относительно заданной поверхности (м);
fк – фокусное расстояние фотосистемы (м);
GSD – проекция пикселя матрицы ЦАФА на заданной поверхности (м);
R – разрешение на матрицы (цикл/пиксель)
δ – размер пикселя матрицы (м).
При разрешении GSD, равном 2 см,
Нф = f∙GSD/Pxl =
= 0,011∙0,02/0,00000236 = 93.3 м;
по программе (Autel Explorer) Нф = 93 м.
Расчетное продольное перекрытие аэрофотоснимков, рх %:
рх = рхо + Δрh + Δрн, (2)
где рхо – минимальное продольное перекрытие = 60%,
Δрh – поправка за рельеф,
 , (3)
, (3)
где Δh – разность между самой высокой точкой и самой низкой точкой участка,
Δрн – навигационная поправка за ошибку самолетовождения.
рх = рхо + Δрh + Δрн =
= 60+ (13-0)∙(100-60) / 186 + 4 = 87,34%,
рх = ٨٥ % по (Autel Explorer).
Расчетное поперечное перекрытие аэрофотоснимков ру, %:
Для масштаба 1:10 000 и крупнее
py= 40 % + (50 ∙  ). (4)
). (4)
Для масштаба 1:10 000 и крупнее
ру = 40 + (50∙(13/186) = 73,41 %,
ру = 7٠ % по (Autel Explorer).
Продольный базис фотографирования, Вх (м):
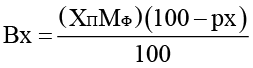 , (5)
, (5)
где MФ = НФ / f – знаменатель масштаба фотографирования,
MФ = 8474,545,
Вх = 184,88 по (Autel Explorer)
MФ = 8٥٠٠, Вх = 185,44.
Поперечный базис фотографирования Ву (м):
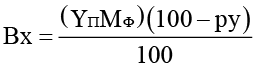 , (6)
, (6)
где XП, YП – физический размер матрицы (м)
Ву = 156.4, Ву =1٧٠ по (Autel Explorer).
Интервал фотографирования τ (сек):
 , (7)
, (7)
где XП – физический размер фото матрицы вдоль линии полета (м),
W – путевая скорость БВС (м/с).
τ = 4 (сек) по (Autel Explorer).
Количество аэроснимков в одном маршруте Nx :
Nx = (Lx / Bx) + N3; N3 = 4, (8)
где Lx – длина участка съемки (м)
Nx = 10.27 по (Autel Explorer) Nx = 12.
Количество маршрутов Nу:
Nу = (Ly / By) + 0.5∙j; j = 2,
где Nу ширина участка (м), (9)
Ny = 4, по (Autel Explorer) Ny = 4.
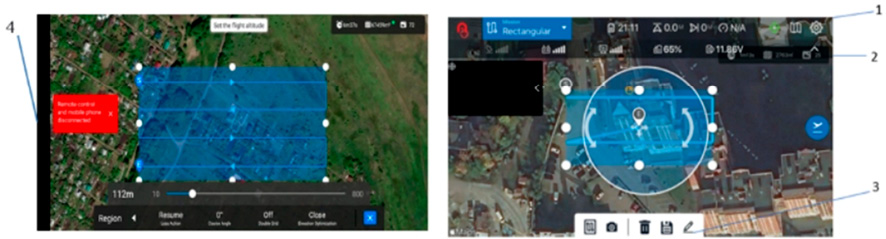
Рис. 4. Программа Autel Explorer: 1 – настройка; 2 – создание новой миссии; 3 – редактирование миссии; 4 – настройка параметров съемки Примечание: составлен автором по результатам данного исследования
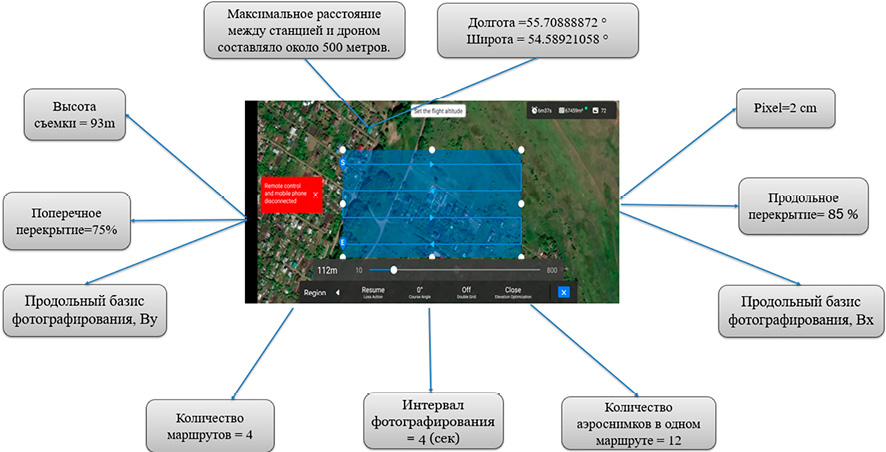
Рис. 5. Расчетные данные аэрофотосъемки в программе Autel Explorer Примечание: составлен автором по результатам данного исследования
На рис. 5 показаны расчетные параметры аэрофотоснимков, сгенерированные программной Autel Explorer, и проведено их сравнение с результатами, полученными с использованием аналитических формул для съемки.
Третий, камеральный этап включает постобработку собранных данных. Базовым требованием для корректной обработки и компенсации погрешностей является синхронная регистрация в реальном времени полета информации из следующих источников: данные БПЛА (файл формата UBX), измерения наземной станции Fora Lux (файл формата UNC) и аэрофотоснимки (формат JPG). Первичная обработка заключается в преобразовании файлов спутниковых измерений в формат RINEX с последующей коррекцией координат центра съемки относительно опорной точки. Полученные поправки применяются к снимкам для минимизации ошибок геопривязки на дальнейших этапах. Данный этап выполняется в программном комплексе Geobox Office, который обеспечивает обработку ГНСС-измерений, коррекцию временных меток в RINEX-файлах, фильтрацию дублирующихся данных, сопоставление снимков с точными координатами (с возможностью редактирования метаданных EXIF) и работу с локальными системами координат [15] (рис. 6). Процесс обработки в Geobox Office включает следующие шаги: загрузка файла данных приемника БПЛА и файла статической наземной базовой станции, где расстояние от БПЛА до базового приемника, установленного на геодезическом пункте, не превышало 500 м; автоматическая загрузка стандартных параметров обработки с последующей возможностью их ручной коррекции; задание координат наземной станции (ручной ввод или автоматический расчет как среднего значения измерений приемника); добавление аэрофотоснимков и запуск процесса обработки.
В результате для каждого изображения генерируется набор модифицированных координат. Эти данные импортируются в программный комплекс Agisoft Metashape для обработки изображений и создания конечного продукта. Рабочий процесс включает в себя создание плотного облака точек, построение 3D-модели и текстуры, а также генерацию производных продуктов – ЦМР и ортофотоплана на основе плотного облака точек и модели [16, 17] (рис. 7).
При сравнении координат центра изображения, полученных из файла данных приемника БПЛА, которые выступают в качестве контрольных точек, с координатами центра изображения после обработки в Geobox Office были обнаружены следующие ошибки: максимальная ошибка по оси X составляет 4,79 см, по оси Y = 5,75 см, по высоте Z = 8,021 см, по плоскости XY = 7,48 см, а общая ошибка, или среднее квадратическое отклонение, составляет 10,97 см. Результаты сравнения представлены на рис. 8.
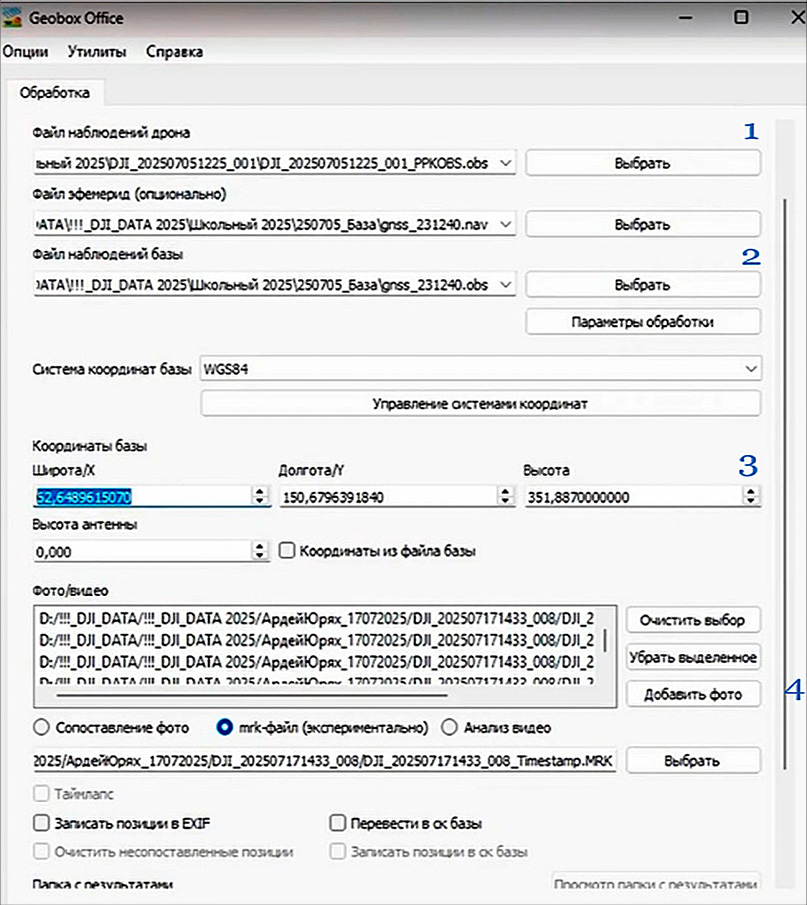
Рис. 6. Процесс обработки данных в программе Geobox Office Примечание: составлен автором по результатам данного исследования

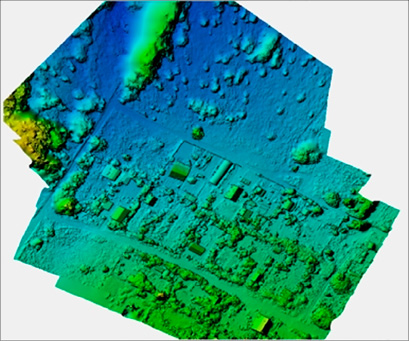
Рис. 7. Ортофотоплан и ЦММ, поселок Лекаревка, город Уфа, Республика Башкортостан Примечание: составлен автором по результатам данного исследования

Рис. 8. Погрешность определения координат (Лекаревка) Примечание: составлен автором по результатам данного исследования
Для создания ортофотоплана и цифровой модели местности для второго сценария, где расстояние между БПЛА и ближайшей базовой станцией спутниковой сети (в данном случае станцией UFA2) не превышает 30 км, а местоположение находится к северо-востоку от точки аэрофотосъемки, авторы повторяют обработку в программном обеспечении Geobox Office. Это включает в себя загрузку файла данных с приемника БПЛА и файла RINEX, полученного со станции UFA2. Файл RINEX можно загрузить с официального сайта CORS.
На рис. 9 показано, как загрузить файл с официального сайта: первый шаг – выбор базовой станции – UFA2, второй – указание часового пояса, третий – установка параметра «Точность измерения» на 10 с, который является общедоступной максимально возможной точностью, и последний шаг – загрузка файла RINEX [18]
В исследовании использовались данные постоянной станции UPHA. Файл наблюдений в формате RINEX также был получен с официального сайта сети. Станция UPHA расположена примерно в 31 км к востоку от места проведения аэрофотосъемки, в районе поселка Лекаревка. На рис. 10 показаны географические координаты всех этих точек.
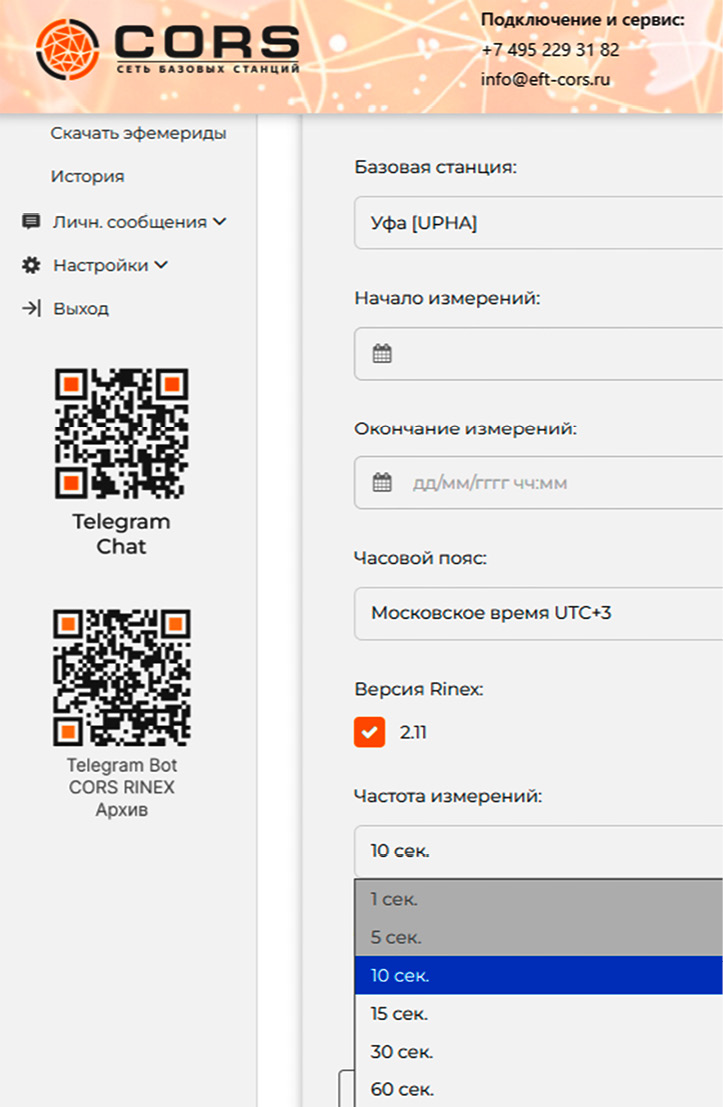
Рис. 9. Порядок загрузки файла RINEX базовой станции Ufa2 Примечание: составлен автором по результатам данного исследования
Средняя квадратическая ошибка при сравнении координат центра изображения, полученных из файла данных приемника БПЛА, с координатами центра изображения после обработки в Geobox Office для станции UFA2 равнялась 12,56 см и для станции UPHA равнялась 13,38 см. Визуализация результатов сравнения координат приведена на рис. 11 и 12. А в предыдущих сравнениях с наземной базовой станцией, где расстояние от БПЛА до приемника не превышало 500 м, средняя квадратическая ошибка равнялась 10,97 см.
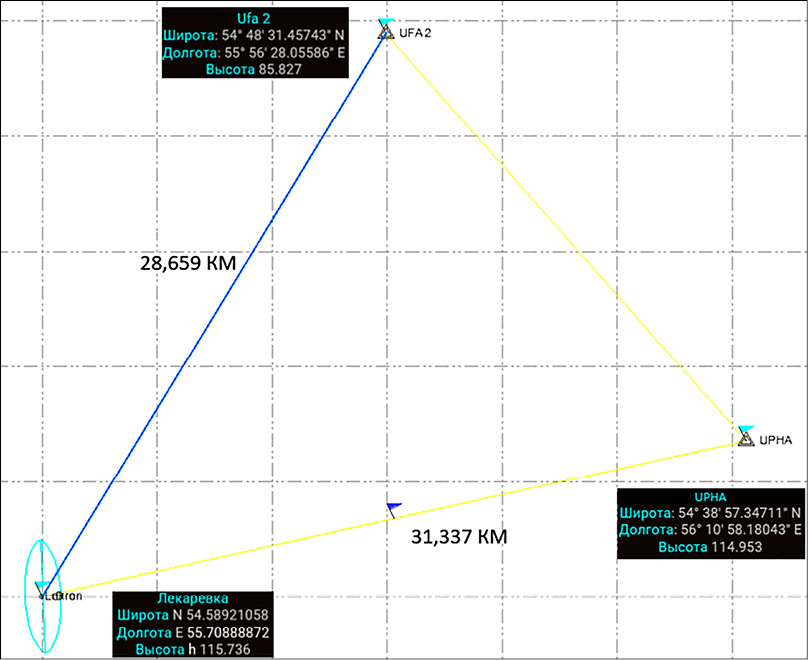
Рис. 10. Картографическая привязка всех пунктов Примечание: составлен автором по результатам данного исследования

Рис. 11. Погрешность определения координат (Ufa2) Примечание: составлен автором по результатам данного исследования
При увеличении расстояния между БПЛА и базовой станцией до 76 км (третий сценарий) была использована базовая станция «Раевка», расположенная в 76,242 км к юго-западу от района съемки. На рис. 13 показана область аэрофотосъемки с БПЛА относительно базовой станции во всех сценариях.

Рис. 12. Погрешность определения координат (UPHA) Примечание: составлен автором по результатам данного исследования
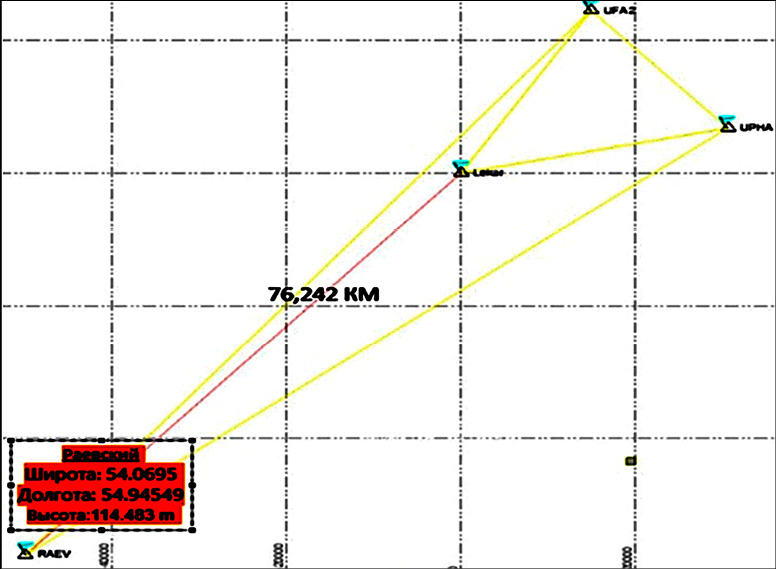
Рис. 13. Картографическая привязка всех базовых станций Примечание: составлен автором по результатам данного исследования
Для обработки данных и получения координат центров фотографирования, которые входят в качестве опорных пунктов, использованы файлы (RINEX) данных станций с официального веб-сайта сети CORS по порядку, как указано на рис. 9. В программном комплексе Geobox Office были выполнены последовательные шаги: загрузка файла данных приемника БПЛА и данных базовой станции «Раевка» (RINEX), выбор системы координат, добавление фотографий и, наконец, запуск процесса обработки.

Рис. 14. Погрешность определения координат (Раевка) Примечание: составлен автором по результатам исследования
В результате при сравнении координат центров изображений среднее квадратическое отклонение центров изображений составило 12,29 см. Отклонение каждого снимка указано на рис. 14.
Исследование подтверждает возможность построения ортофотоплана и ЦММ с использованием данных открытых ГНСС-станций (файлы RINEX с интервалом 10 с). Показано, что погрешность определения координат незначительно зависит от расстояния до станции, даже при превышении 70 км. Также доказана возможность создания аэрофотоснимков без привлечения классических наземных геодезических точек. В предложенном методе в качестве опорных используются координаты центров самих изображений.
Результаты исследования и их обсуждение
1. Исследование показало, что использование данных RINEX из сети непрерывно работающей ГНСС-станции (CORS) позволяет создавать ортофотопланы и цифровые модели местности без необходимости традиционной полевой геолокации с использованием контрольных точек, требуемых традиционными методами. Эта технология исключает дорогостоящую и трудоемкую полевую работу, необходимую при традиционных методах аэрофотосъемки.
2. Точность ортофотопланов и цифровых моделей местности, полученных с использованием данных от статичного ГНСС-оборудования, установленного на геодезических пунктах (статический режим), лишь незначительно отличается от точности ортофотопланов и ЦММ, созданных с использованием данных с базовой станции, работающей в постобработке (PPK). Это подтверждает взаимозаменяемость этих двух источников данных для достижения требуемой точности.
3. Средняя квадратическая ошибка определения координат центров изображения, рассчитанная с использованием данных от ГНСС-станций сети CORS, остается стабильной и не показывает статистически значимой зависимости от расстояния между базовой станцией и БПЛА в исследуемых диапазонах (до 76 км). Это демонстрирует надежность и эффективность данной технологии, обеспечивая увеличенную дальность действия до базовой станции.
Conflict of interest
Acknowledgements
Financing
Библиографическая ссылка
Насереддин Х.Х., Акель М.А. ПОВЫШЕНИЕ ТОЧНОСТИ ГЕОПРИВЯЗКИ СНИМКОВ БЕСПИЛОТНЫХ АППАРАТОВ АЭРОФОТОСЪЕМКИ БАЗОВЫМИ СТАНЦИЯМИ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ // Успехи современного естествознания. 2026. № 2. С. 84-95;URL: https://natural-sciences.ru/en/article/view?id=38482 (дата обращения: 22.07.2026).
DOI: https://doi.org/10.17513/use.38482