



Для повышения несущей способности рамных конструкций вибрационных машин, работающих в условиях вынужденных колебаний, необходимо определение их динамических и прочностных характеристик. Рассмотрим характер возмущающих воздействий на рамную конструкцию со стороны приводного механизма на примере зерноочистительной машины с дезаксиальным кривошипно-шатунным механизмом, с двумя ситовыми корпусами.
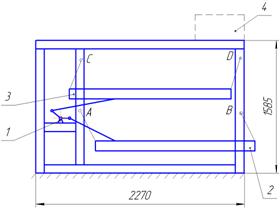
Рис. 1. Несущая конструкция зерноочистительной машины: 1- приводной механизм; 2, 3- ситовые корпуса; 4- аспирационная система
На нижний ситовой корпус в его крайнем правом положении действует следующая система сил (рис. 2, 3).
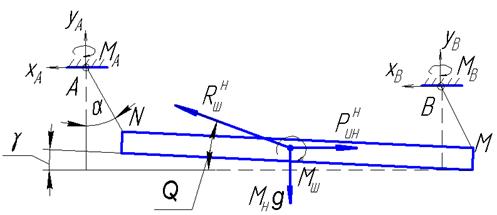
Рис. 2. Схема сил, действующих на нижний ситовой корпус с подвесками: Мнq - сила тяжести; Ринн - сила инерции; Мш , Rшн - реакции шатуна; XA, YA, МA, XВ, YВ, МВ - реакции в точках заделки подвесок (т. А и т. В)
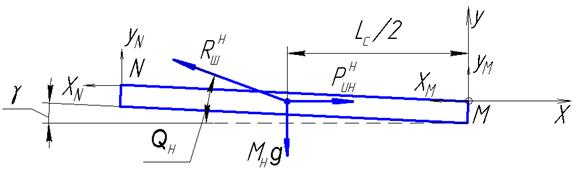
Рис. 3. Схема сил, действующих на нижний ситовой корпус
Для определения реакций в точках N и М составим уравнения равновесия для плоской системы сил.
 (1)
(1)
Сила инерции Ринн определяется по формуле:
Ринн = Мн · а, (2)
где Мн - масса нижнего ситового корпуса, кг; а - ускорение центра масс нижнего ситового корпуса, м/с2.
Для определения ускорения используем следующую зависимость [1]:
![]() , (3)
, (3)
где r - радиус кривошипа, м; ω - угловая скорость кривошипа, рад/с; t - время, с; e - величина дезаксиального смещения, м; Lш - длина шатуна, м.
Учитывая, что МА=0, МВ=0 и реакция подвески направлена вдоль нее, получаем:
хN = yN × tga, (4)
xM = yM × tga, (5)
Угол a изменяется по закону:
tg α = (r/Ln ) ×cos ω·t (6)
C учетом выражений (4)-(6) составляющие реакций в т. N и т. М будут определяться следующими выражениями:
хN= yN × (r/Ln ) ×cos ω·t, (7)
xM= yM × (r/Ln ) ×cos ω·t. (8)
Введем следующие обозначения: Rшн = R1; МN= М2; LC=L1; Ln=L3.
С учетом этого система уравнений (1) принимает следующий вид:
Решая данную систему уравнений относительно хN , xM , yN , yM и R1, получаем:
 , (10)
, (10)
 (11)
(11)
![]() , (12)
, (12)
хN= yN × (r/L3) ×cos ω·t, (13)
xM= хM . (14)
Решая данные уравнения относительно времени и угловой скорости кривошипа с подстановкой конкретных параметров (для зерноочистительной машины ЗВС-20А), получаем следующие значения хN, xM , yN , yM и R1:
xN = -1,217+11,513·cosωּt+1,605·10-4·sinωּt-1,217·cos2ωּt+0,16·sin2ωּt (15)
yN = 813,5-171,966·cosωּt+22,562·sinωּt- 0,171·cos2ωּt+0,023·sin2ωּt (16)
 (17)
(17)
Аналогичным образом находятся реакции в подвесках и усилия в шатуне для верхнего ситового корпуса.
В результате получаем следующую схему приложения возмущающих сил к раме (рис. 4).
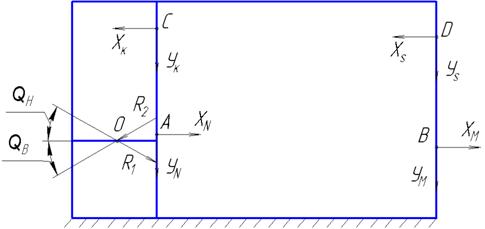
Рис.4. Схема приложения возмущающих сил
Составляющие реакций со стороны шатунов на раму в точке О можно представить как
![]() , (18)
, (18)
![]() . (19)
. (19)
Определяем величины x0 и y0 в зависимости от времени и угловой скорости кривошипа.
x0 = 0,228+ 229,451·cosωּt- 30,1·sinωּt+ 0,228·cos2ωּt -0,03·sin2ωּt (20)
y0= -0,652- 656,049·cosωּt+ 86,088·sinωּt- 0,652·cos2ωּt+ 0,086· sin2ωּt (21)
При определении внутренних силовых факторов в несущей конструкции вибрационной машины полученные зависимости позволят представить их в виде функции времени, проанализировать характер наложения вибрационных характеристик, а также учесть их при расчете несущей способности.
СПИСОК ЛИТЕРАТУРЫ:
- Борискин М.А. и др. Сепарирующие машины зерноперерабатывающих предприятий /М.А. Борискин, В.В. Гортинский, А.Б. Демский.- М.: Машиностроение, 1979.- 109 с.
Библиографическая ссылка
Уманская О.Л. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ УСИЛИЙ В ДЕТАЛЯХ ПРИВОДНОГО МЕХАНИЗМА ВИБРАЦИОННОЙ СЕПАРИРУЮЩЕЙ МАШИНЫ С ДЕЗАКСИАЛЬНЫМ КРИВОШИПНО-ШАТУННЫМ МЕХАНИЗМОМ // Успехи современного естествознания. 2007. № 5. С. 108-110;URL: https://natural-sciences.ru/ru/article/view?id=11140 (дата обращения: 14.07.2026).