



Механизмы перекатывающихся рычагов можно разделить на две группы: механизмы, в которых рычаги катятся друг по другу со скольжением и механизмы, в которых рычаги катятся без скольжения (чистое качение). Для рассмотрения кинематического анализа первой группы механизмов перекатывающихся рычагов обратимся к приведенному в книге академика И.И. Артоболевского [1, стр.592] рычажно-кулачковому механизму перекатывающихся рычагов №1710, в котором перекатывание рычагов друг по другу происходит со скольжением (рисунок 1).
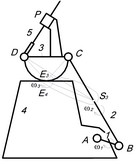
Рисунок 1. Рычажно-кулачковый механизм перекатывающихся рычагов №1710

Рисунок 2. План скоростей механизма
Механизм состоит из входного звена (кривошипа 1) и трехзвенной группы (шатун 2, рычаг 3, звено 5), рычаг 3 представляет собой трехпарное звено с высшей кинематической парой (точкой касания Е звеньев 3 и 4). Трехзвенная группа обладает нулевой подвижностью, т.к. в ней число подвижный звеньев n=3, число пар пятого класса р5=4 и одна пара четвертого класса р4=1, т.е. по формуле Чебышева П.Л.:
W=3n-2p5-p4=0.
Подвижность механизма:
W=3n-2p5-p4=1,
т.к. число подвижный звеньев n=4, число пар пятого класса р5=5 и одна пара четвертого класса р4=1, т.е. достаточно задать движение кривошипу 1, чтобы все остальные звенья двигались вполне определенно.
Нахождение скоростей точек звеньев механизма будем осуществлять графо-аналитическим методом. В данном механизме известными являются скорости точек А, В и Е4. Прежде всего, найдем скорость точки Ассура S3, которая лежит на пересечении линии ВС и перпендикуляра к неподвижной направляющей DP, проведенного из центра ближайшей вращательной кинематической пары, т.е. из точки D. Точка Ассура S3 принадлежит рычагу 3 (рисунок 1). Векторное уравнение для скорости точки S3 имеет вид:


Вектор  определит вектор угловой скорости звена 2, а вектор
определит вектор угловой скорости звена 2, а вектор  определит вектор угловой скорости звена 3, величины которых найдем из равенств:
определит вектор угловой скорости звена 3, величины которых найдем из равенств:
 ,
,  .
.
Уравнения для нахождения скорости точки Е3:

скорость  есть скорость скольжения в точке касания Е звеньев 3 и 4, направлена она по касательной к опоре в точке Е (Е3, Е4).
есть скорость скольжения в точке касания Е звеньев 3 и 4, направлена она по касательной к опоре в точке Е (Е3, Е4).
Скорость точки С найдем из уравнений:

Векторные уравнения для скорости точки D имеют вид:

План скоростей представлен на рисунке 2. Тот факт, что на плане скоростей точка е3 не совпала с точкой е4, т.е.  или
или  , доказывает, что перекатывание рычага 3 по опоре 4 происходит со скольжением.
, доказывает, что перекатывание рычага 3 по опоре 4 происходит со скольжением.
Научный руководитель: Дворников Л.Т., д.т.н., профессор
Библиографическая ссылка
Баклушин А.A., Максимова Е.Н. ОСОБЕННОСТИ КИНЕМАТИЧЕСКОГО ИССЛЕДОВАНИЯ МЕХАНИЗМОВ ПЕРЕКАТЫВАЮЩИХСЯ РЫЧАГОВ ПРИ КАЧЕНИИ СО СКОЛЬЖЕНИЕМ // Успехи современного естествознания. 2014. № 8. С. 141-142;URL: https://natural-sciences.ru/ru/article/view?id=34088 (дата обращения: 14.06.2026).