



При бурении нефтяных и газовых скважин получение достоверной информации о траектории скважины имеет первостепенное значение. Точность проводки скважин по заданной траектории в большой степени зависит от метрологических параметров забойной инклинометрической аппаратуры. Для того чтобы показания инклинометрической аппаратуры были достоверны на протяжении всего времени эксплуатации, инклинометры подвергаются периодической проверке и поверке. Поверка скважинных инклинометров производится на стационарных метрологических установках в лабораториях и базах геофизических предприятий. Поверка инклинометров сопровождается продолжительным снятием прибора с процесса эксплуатации, что влечет за собой необходимость использования дополнительных инклинометров. Проверка инклинометров непосредственно на месторождении позволила бы существенно сократить финансовые потери.
Достижения спутниковой навигации с использованием точных геодезических GPS/ГЛОНАСС-приемников позволяют разработать новые устройства для поверки инклинометров в условиях нефтяных и газовых месторождений. Разрабатываемые модели установок позволяют реализовать эталонную систему азимутальных углов, незначительно уступающих по точности существующим лабораторным метрологическим установкам пространственной ориентации скважинных инклинометров. Разработана методика начальной азимутальной выставки гироинклинометра с помощью GPS-компаса [3]. В работах [1, 2] рассмотрен принцип проверки скважинных инклинометров с помощью GPS-компаса
Целью работы является оценка возможности создания комплекса для проверки скважинных инклинометров на месторождении с использованием GPS/ГЛОНАСС-технологий.
Характеристики современных геодезических GPS-приемников
Геодезические GPS-приемники специально созданы для точного определения координат точечных объектов. GPS приемники бывают следующих модификаций: одночастотные, двухчастотные и многочастотные. Одночастотные используют для межевания земель и проведения подсчета площади участков больших размеров, двухчастотные – для создания сетей сгущения опорных геодезических и межевых сетей, проведения съемок линейных объектов и топографических съемок. Многочастотные приемники производят все вышеперечисленные виды работ, а также имеют возможность получения координат в реальном времени (в поле) [7]. GPS-приемник состоит из следующих частей: антенны, принимающего устройства и полевого контроллера. Во всех GPS-приемниках высокая степень защиты от падений (с высоты до 1,5 м), пыли и влаги. Также технические характеристики приемника позволяют эксплуатировать прибор в экстремальных условиях: температуры от –30 до +65 °C. В настоящее время существуют GPS/ГЛОНАСС-приемники, обладающие достаточной точностью для выполнения данной задачи (например, Topcon Hiper GDD) [5]. Наименьшая погрешность определения координат приемника в режиме работы «Статика» составляет в плане ±3 мм, а по высоте ±5 мм.
Метод решения задачи
Сущность метода заключается в том, что на краях устройства 1 для проверки инклинометра 2 (рис. 1) на определенном расстоянии Б друг от друга, называемом базой, установлены два геодезических GPS/ГЛОНАСС-приемника 3 и 4 [1, 2, 3]. С помощью систем спутниковой навигации определяются координаты местоположения приемников в плане. Проверяемый инклинометр 3 скрепляется с устройством 1 для поверки таким образом, чтобы продольная ось устройства и ось инклинометра были параллельны. На корпусе устройства установлен цифровой наклономер 5.

Рис. 1. Принципиальная схема комплекса для поверки инклинометров: 1 – устройство; 2 – инклинометр; 3, 4 – геодезические GPS-приемники; 5 – цифровой наклономер; 6 – блок сопряжения; 7 – компьютер
После определения координат местоположения геодезических приемников 3, 4 и угла наклона наклономера 5 информация с них поступает на блок сопряжения 6 и далее на персональный компьютер 7, где происходит вычисление азимутального, зенитного углов, сравнение и вывод информации на монитор персонального компьютера 7, сохранение полученных данных.
Особенности применения GPS/ГЛОНАСС-приемников в статическом режиме
Статика – это классический метод измерений, хорошо подходящий для всех типов базовых линий (коротких, средних, длинных). По крайней мере два приёмника должны быть установлены на точках, одновременно работать на обоих концах базовой линии в течение определённого периода времени. Эти два приёмника отслеживают четыре и более спутника, имеют один и тот же интервал в записи данных (5–30 секунд). Продолжительность сеанса измерений может быть от нескольких минут до нескольких часов. Оптимальная продолжительность измерений зависит от опыта геодезиста, а также от следующих факторов: длины измеряемой базовой линии; числа видимых спутников; качества спутниковой геометрии (DOP); местоположения антенны; уровня ионосферной активности; типа используемого приёмника; точностных требований заказчика.
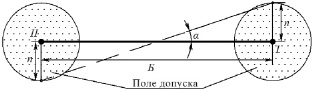
Рис. 2. Схема оценки погрешности азимутального угла: Б – расстояние между приемниками – база; п – погрешность приемника; I, II – номинальные значения координат приемников; α – погрешность определения азимутального угла
Для решения поставленной задачи будут использоваться двухчастотные приемники, так как они имеют два значительных преимущества. Во-первых, двухчастотные приёмники могут оценить и ликвидировать большую долю ионосферного влияния на сигнал спутника, предоставив более высокую точность по отношению к одночастотным приёмникам на более длинных базовых линиях и в условиях ионосферных бурь. Во-вторых, при одинаковом уровне точности продолжительность сеанса измерений у двухчастотных приёмников короче, чем у одночастотных.
Способность приемников определять координаты местоположения в плане дает возможность реализовать по координатам азимутальный угол.
Оценка погрешности метода
На рис. 2 представлена схема оценки погрешности определения азимутального угла. Рассмотрим случай максимально возможной ошибки определения азимута. Это произойдет, когда погрешность определения координат местоположения приемников I и II будет наибольшей и расхождения координат будут направлены в противоположные стороны от номинального расположения приёмников. Поля допусков на каждую координату, определенную приемником I и II, представлены в форме круга.
Максимальная погрешность определения азимутального угла вычисляется по формуле
 (1)
(1)
Результаты расчетов максимальной погрешности определения истинного азимута для разных длин баз приведены в таблице.
Результаты расчета максимальной погрешности определения истинного азимута
|
Длина базы Б, м |
Погрешность приемника п, м |
Погрешность определения истинного азимута α, угл. мин |
|
1,000 |
0,003 |
20,626 |
|
2,000 |
0,003 |
10,313 |
|
3,000 |
0,003 |
6,875 |
Расчет погрешности азимутального угла методом max-min показал, что при длине базы 2 м она составляет 10,3′. Если учесть, что в большинстве случаев рассеивание значений погрешности определения координаты приемника соответствует нормальному закону распределения, то предельные значения погрешности будут иметь место лишь в незначительном количестве измерений. Также нужно учитывать, что при одновременной работе двух приемников их ошибки, обусловленные в основном уровнем ионосферной активности, будут практически одинаковыми. Эти результаты показывают возможность использования метода для поверки скважинных инклинометров непосредственно на месторождении.
Для перевода географических координат в угол азимута существует несколько методов [6]:
1. Сферическая теорема косинусов
 (2)
(2)
где φ1, λ1; φ2, λ2 – широта и долгота двух точек в радианах; Δλ – разница координат по долготе; Δσ – угловая разница (азимут).
2. Формула гаверсинусов.
Используется, чтобы избежать проблем с небольшими расстояниями
 (3)
(3)
3. Модификация для антиподов
Предыдущая формула подвержена проблеме точек-антиподов, чтобы ее решить используется следующая ее модификация:
 (4)
(4)
Наиболее достоверные результаты даёт расчёт по формуле (4).
В настоящее время применение GPS/ГЛОНАСС-приемников целесообразно только для нахождения азимутальных углов. Определение зенитных углов поверяемого инклинометра данным методом невозможно из-за недопустимо больших погрешностей. Использование системы с применением геодезических GPS/ГЛОНАСС-приемников и более усовершенствованной системы навигации позволит в будущем значительно уменьшить затраты на процедуры проверки инклинометрической аппаратуры и повысить эффективность буровых работ.
Один из вариантов реализации идеи проверки инклинометров в условиях месторождения [4] поясняется чертежами, на которых изображено: на рис. 3 – устройство при проверке скважинных инклинометров по азимутальным углам; на рис. 4 – устройство при проверке скважинных инклинометров по зенитным углам.
Устройство для проверки скважинных инклинометров по азимутальным углам содержит металлический корпус 1 с размещенными внутри опорными призмами 2 (рис. 3). На призмы установлен проверяемый инклинометр 3. Над призмами в корпусе 1 размещены поджимные винты 4. На корпус 1 установлены два геодезических приемника 5 и цифровой наклономер 6. В нижней части корпуса 1 по краям установлены две оси 7, в каждой из которой имеется по две регулируемые опоры 8 (рис. 3).
При проверке поверяемый инклинометр 3 помещают внутрь корпуса 1 на опорные призмы 2 и поджимают винтами 4. Продольная ось устройства и ось инклинометра расположены параллельно. При проверке инклинометра по азимутальному углу устройство выставляется в плоскость горизонта с помощью регулируемых опор 8 и наклономера 6. С помощью спутниковых навигационных систем определяются координаты местоположения приемников.
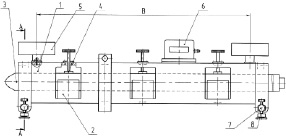
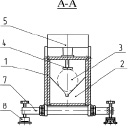
Рис. 3. Устройство при проверке скважинных инклинометров по азимутальным углам: 1 – корпус устройства; 2 – опорная призма; 3 – проверяемый инклинометр; 4 – поджимной винт; 5 – геодезический GPS-приемник; 6 – цифровой наклономер; 7 – ось; 8 – опора регулируемая
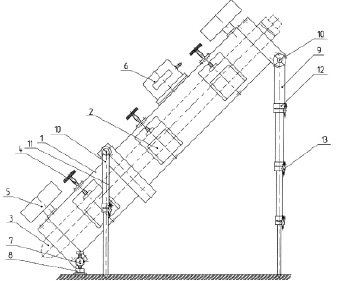
Рис. 4. Устройство при проверке скважинных инклинометров по зенитным углам: 9 – телескопическая опора; 10 – шарнир; 11 – дополнительная телескопическая опора; 12 – хомут; 13 – винт
В устройстве для проверки скважинных инклинометров по зенитным углам вместо одной из осей 7 установлена телескопическая опора 9 с шарниром 10 (рис. 4). На корпусе устройства установлены две дополнительные телескопические опоры 11. На телескопических опорах 9, 11 установлены хомуты 12 с винтами 13.
Проверку по зенитному углу осуществляют с помощью цифрового наклономера 6. Для проверки инклинометра при различных значениях зенитных углов (в диапазоне от 0° до 90°) изменяют угол наклона устройства, изменяя длину телескопической опоры 9 с последующей фиксацией и введением в контакт с основанием двух дополнительных телескопических опор 11. Фиксация секций телескопических опор 9, 11 по длине осуществляется хомутами 12 путем зажима винтов 13.
Заключение
В настоящее время применение GPS/ГЛОНАСС-приемников целесообразно только для нахождения азимутальных углов. Определение зенитных углов поверяемого инклинометра данным методом невозможно из-за недопустимо больших погрешностей. Использование системы с применением геодезических GPS/ГЛОНАСС-приемников и более усовершенствованной системы навигации позволит в будущем значительно уменьшить затраты на процедуры проверки инклинометрической аппаратуры и повысить эффективность буровых работ.
Предлагаемое устройство оснащено двумя GPS/ГЛОНАСС-приемниками и цифровым наклономером, что позволяет использовать прибор не только для начальной азимутальной выставки гироинклинометров, но и для проверки инклинометров по азимутальному и зенитному углам.
Библиографическая ссылка
Гормаков А.Н., Андронов А.А. КОМПЛЕКС ДЛЯ ПРОВЕРКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ НА МЕСТОРОЖДЕНИИ С ИСПОЛЬЗОВАНИЕМ GPS/ГЛОНАСС-ТЕХНОЛОГИЙ // Успехи современного естествознания. 2016. № 2. С. 154-158;URL: https://natural-sciences.ru/ru/article/view?id=35806 (дата обращения: 02.07.2026).