



Создание цифровых многомерных (2D, 3D и 4D) документов о местности крупных и сверхкрупных масштабов является одной из основных задач топогеодезического обеспечения территорий. Потребность в этих документах возрастает в силу универсальности их применения – архитектура, градостроительство, ландшафтное проектирование, кадастр недвижимости, прикладной экологии и географии, ландшафтоведения и т.д. Достаточно широк и круг методов, используемых для получения моделей местности с необходимой точностью и детальностью построения.
В настоящее время для решения подобных задач используются как наземные методы топогеодезической съемки, так и аэрофототопографические методы с применением приборов спутникового позиционирования. В частности, топогеодезическая наземная съемка с использованием спутниковых определений на основе метода RTK обеспечивает получение данных съемки с точностью до 0,1 м. Этот метод достаточно оперативен, но если необходима топографическая съемка больших территорий, то процесс будет достаточно трудоемким и длительным при реализации. Стоит также учитывать высокую стоимость оборудования и технологии в целом [1, 2].
При крупномасштабной съемке (от 1:2 000 и крупнее) существенно более эффективно и результативно применяется аэрофототопографический метод на базе использования БВС. Такой подход позволяет быстро получить ЦММ (ЦМР) с пространственным разрешением на поверхности порядка 0,05–0,2 м в зависимости от высоты фотографирования и класса съемочной аппаратуры. Чтобы получить удовлетворительные результаты при использовании аэрофототопографического метода с возможной его комбинацией с воздушным лазерным сканированием на борту БВС, необходимо использовать навигационные системы, оснащенные интегрированными системами спутниковой и инерциальной навигации четвертого поколения, позволяющие выполнять БВС в роботизированном режиме за пределами прямой видимости с пунктов управления. Ожидаемая точность получения плановых координат – 2–10 см, ожидаемая точность определения высоты – 10–15 см при съемке с высоты до 500 м.
Имитационное моделирование любого научного эксперимента экономит множество усилий, времени и денег, и нет никаких сомнений в том, что оно дает хорошие, надежные результаты, на которые можно положиться в научной работе, и на их основе можно формулировать подход к получению адекватных параметров в реальных полевых экспериментах при условии выбора значений, соответствующих конкретным условиям съемки.
В данной работе авторами рассматривается комплекс вопросов подбора аппаратуры, планирования и выполнения аэрофотосъемки и (или) лазерно-локационной съемки с борта БВС, а также методов и средств обработки съемочных материалов с целью создания цифровых документов, описывающих местность, с заданными масштабом и точностью. При этом ключевым моментом в этих процедурах является их реализация в среде имитационного цифрового компьютерного 3D-моделирования с привлечением необходимого дополнительного инструментария в виде ГИС, ЦФС и т.д. Предлагаемый в работе подход позволяет перебрать (прокрутить) любое разумное количество вариантов решения поставленной задачи, не прибегая к натурным экспериментам. Это дает возможность сэкономить время и средства для получения оптимальных параметров аэросъемки с учетом изучения влияния таких параметров на качество, прежде всего – на точность конечной продукции – ЦММ, (ЦМР).
Программное обеспечение для имитационного моделирования
В настоящее время программы 3D-модели-рования реальности достигли такого уровня, что количество задач, решаемых ими, стало огромным. Сегодня в этом секторе рынка имеется очень широкий спектр программного обеспечения для 3D-моделирования, как бесплатных [3], так и коммерческих продуктов разной степени сложности и стоимости. Из значительного количества пакетов для 3D-моделерования можно выделить наиболее популярные и востребованные [4, 5], которые представлены в таблице 1.
Таблица 1
Программы трехмерного моделирования
|
Наименование |
Цена (руб./год) |
Уровень пользователя |
Платформы |
|
Autodesk 3ds Max |
От 320 000 |
Профессионал |
Windows |
|
Houdini |
От 600 000 |
Профессионал |
Win, MacOS, Linux |
|
Cinema 4D |
От 110 000 |
Профессионал и любитель |
Win, MacOS |
|
ArchiCAD |
От 240 000 |
Профессионал и любитель |
Win, VacOS |
|
Blender |
Бесплатно |
Профессионал и любитель |
Win, MacOS, Linux |
Среди отмеченных программных средств для трехмерного моделирования реальности среда 3D-моделирования Blender выделяется универсальностью применения и уникальными возможностями подключения программных средств для выполнения «внутренних» процедур выполнения необходимых процессов в цепочке моделируемой технологии и доступностью для широкого круга пользователей. Являясь профессиональным свободным и открытым программным обеспечением для создания трехмерных компьютерных моделей, в настоящее время ПО Blender пользуется большой популярностью среди бесплатных 3D-редакторов в связи с его быстрым стабильным развитием и хорошей технической поддержкой.
Так, ПО Blender позволяет спроектировать корректную схему залетов, учесть (изучить) влияние погрешностей фиксируемых координат центров проекций снимков на известные элементы внутреннего ориентирования камеры, включая дисторсию, на точность создаваемой по снимкам ЦММ. Таким способом можно подбирать оптимальные параметры (установки) съемки и выявлять геометрию расположения необходимого количества опорных точек в зависимости от сложности ситуации, что позволит получить ЦММ (ЦМР) высокой точности и качества.
У ПО Blender, как и других программных комплексов из таблицы 1, имеется схожий набор функций, необходимых для имитационного моделирования аэрофототопографических работ. Отметим некоторые функции, важные для моделирования аэрофотосъемки и воздушного лазерно-локационного сканирования:
– импорт трехмерной модели исходной (эталонной) местности для съемки или формирование ее встроенным инструментарием;
– имитация полета БВС в части его движения по заданным маршрутам с определенной высотой и скоростью согласно предварительным расчетам параметров аэрофотосъемки;
– наличие внутренней камеры, которая может отслеживать траектории движения;
– получение массива виртуальных снимков исходной местности с элементами внешнего и внутреннего ориентирования.
Очень важно, что можно моделировать различные условия полета воздушного судна с учетом влияния метеоусловий (ветра, запыленности, облачности) и вносить эти факторы как случайные и систематические погрешности (шум) в определение запланированных координат полета БВС, погрешности внутреннего и внешнего ориентирования аэрофотоснимков, задавая закон распределения вносимых погрешностей. Моделирование аэрофотосъемки или воздушной лазерно-локационной съемки определенной местности ведется с использованием аэрофототопографического комплекса, включающего воздушное судно (БВС), цифровой аэрофотоаппарат (ЦАФА), воздушный лазерный сканер (ВЛС), спутниковую аппаратуру GPS (ГЛОНАС), инерциальную навигационную систему IMU и т.д.
Полученные данные виртуальной съемки далее обрабатываются подключаемым к среде Blender в процессе постобработки одним из фотограмметрических программных средств – Photomod, MetaShape и пр. Полученную вторичную модель местности можно как исследовать в среде Blender, так и экспортировать в различные 2D- и 3D-форматы для дальнейшей работы с моделью.
В работе нами по отмеченным выше причинам была использована среда имитационного моделирования Blender в текущей 3-й версии на платформе Windows 10 совместно с фотограмметрическим комплексом Agisoft Metashape [6–8].
Подготовка исходных данных для имитационного моделирования съемки
Проведение процедур имитационного моделирования топографической АФС местности предполагает выбор реалистичной модели территории с необходимыми морфологическими и тематическими (объектами на ней) характеристиками и метрической точностью ее описания. Последнее является ключевым, поскольку модель территории нами по замыслу эксперимента является эталоном, с которым мы будем сравнивать производные модели «этой местности», получаемые в процессе ее моделирования по результатам имитации различных вариантов аэрофототопографической съемки.
Для выбора первичной модели в ПО Blender предусмотрено подключение ГИС-инструментов, а также источников данных, которые можно использовать для загрузки исходной модели территории для съемки. В ПО Blender эта задача решается при помощи интернет-ресурса OpenStreetMap, OSM и ГИС. На рисунке 1 приведен интерфейс ПО Blender, в котором стрелками показаны загрузка ГИС инструментария с сайта https://github.com/domlysz/blenderGIS (1) и ресурса OSM с сайта https://prochitecture.gumroad.com/l/blender-osm (2), лазерный сканер (3), первичная (исходная) модель местности (4).
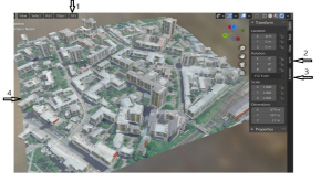
Рис. 1. Интерфейс выбора вспомогательного инструментария в ПО Blender
Таблица 2
Квадрокоптер с мобильной станцией DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo
|
Взлетный вес |
1391 г |
|
Макс. высота полета |
6000 м |
|
Макс. время полета |
до 30 мин |
|
Съемочная камера |
|
|
Объектив |
Угол обзора 84°: 8.8 мм / 24 мм (35-мм эквивалент), f/2.8-f11 |
|
Размер изображения |
4864×3648 (4:3), 5472×3648 (3:2) |
|
Подвес (аэрофотоустановка) |
|
|
Стабилизация |
3-осевая (наклон, поворот, сгибание) |
|
Контролируемый диапазон |
Наклон: от –90° до +30° |
|
Угловая точность управления |
± 0,02° |
Выбор системы лазерного сканирования указан на рисунке 1 ниже. Сканер подключается с сайта https://github.com/ln-12/blainder-range-scanner https://github.com/ln-12/blainder-range-scanner
В частности, нами для имитационного моделирования топографической съемки выбрана территория кампуса Московского университета геодезии и картографии (МИИГАиК) и Государственного университета землеустройства (ГУЗ), расположенных в исторической застройке бывшей Басманной слободы общей площадью порядка 5 га. Диапазон превышений на модели с учетом высоты зданий и сооружений равнялся 63 м. Аналогично подключению модели территории для экспериментальных съемок в интерфейсе ПО Blender предусмотрено подключение технических средств для проведения цифровой аэрофототопографической съемки.
Выбор воздушного судна в целом зависит от конкретной задачи, вида получаемых материалов, размеров, местоположения и типа местности объекта съемки, а также необходимой точности и плотности измерений и, конечно, от метеоусловий [9]. Нашим интересам отвечают малоразмерные БВС, способные нести полезную нагрузку до 2,5 кг. Предпочтение отдавалось моделям вертолетного типа (мультикоптерам) или самолетного типа – летающее крыло. В данном случае нами использован квадрокоптер бюджетного уровня DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo c пилотажно-навигационным оборудованием четвертого поколения и мобильной станцией для режима съемки RTK. Его основные параметры и основные данные фотосъемочных систем приведены ниже [10]. Для нас важно, что DJI Phantom 4 Pro может снимать до 4 кв. км за один полет (табл. 2).
Далее на основании особенностей участка, выбранного воздушного судна и съемочной аппаратуры, а также требований к точности создаваемой вторичной модели местности рассчитываются параметры съемки в идеальных метеоусловиях. Но среда моделирования ПО Blender примечательна тем, что для имитационного моделирования реальной съемки можно задавать широкий спектр изменений (вариаций) внешних условий съемки и наличие, расположение или отсутствие точек съемочного обоснования, их точность позиционирования, а также задавать текущие погрешности в основные параметры съемки, влияющие на точность построения конечной ЦММ. Причем можно вводить как систематические погрешности, так и случайные, закон распределения которых задается для каждого прогона экспериментального моделирования аэрофототопографической съемки.
Моделирование процесса аэрофототопографической съемки
На выбранной трехмерной модели можно добавлять эффекты, необходимые для решения требуемой задачи (освещение, направление и силу ветра, растительность, водные объекты, здания и т.д.). Также нужно рассчитать все параметры аэрофотосъемки (журнал расчета, параметры камеры, маршрут, перекрытие, интервал фотографирования, опорные точки, контрольные точки и т.д.) [11, 12].
Дальше можно добавить погрешности на любой параметр съемки, чтобы оценить факторы, влияние на результат конечного моделирования. На рисунке 2 показаны количество маршрутов БВС (6 маршрутов) рис.2 номер 3, на которых индицируются: точки разворота с одного маршрута на другой, координаты точек фотографирования (БВС), время фотографирования, элементы внешнего ориентирования снимков. Также в интерфейсе задаются характеристики объектива камеры и фотоматрицы.
В условиях имитационного моделирования аэрофотосъемки в «идеальном случае» все параметры указываются без внешних негативных воздействий на процесс и, соответственно, без введения погрешностей как результата этих воздействий. При имитации реальных условий съемки необходимо вводить случайные или систематические погрешности в расчетные параметры аэрофотосъемки, возникающие вследствие различных причин, таких как метеоусловия, погрешности в определении приборных показателей или нестабильные условия работы съемочного оборудования.
На рисунке 3 показан интерфейс программы введения случайных погрешностей в линейные («как случайный шум» с СКО = ±1 м) элементы внешнего ориентирования – Xc Yc и Zc. Аналогично задаются погрешности в угловые элементы внешнего ориентирования снимка –α, ω, к (±10о).
Калибровка съемочной камеры в ПО Blender доступна со всеми параметрами. Алгоритм калибровки в Blender аналогичен известным методам, связанным с фотографированием тест-объекта типа «шахматной доски (рис. 4). С камеры производятся снимки шахматного изображения с разных положений, углов и расстояний. Полученные изображения обрабатываются в специализированной программе (например, Agisoft Metashape), где добавляются изображения, полученные в Blender, и выбирается опция «Сохранить параметры калибровки». Эти параметры будут использоваться до обработки данных аэрофотосъемки.

Рис. 2. Интерфейс задания параметров аэрофотосъемки. 1) фокусное расстояние ЦАФА; 2) размер матрицы; 3) маршруты и точки фотографирования; 4) размер изображения
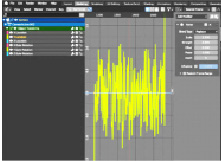
Рис. 3. Установки параметров съемки и добавление случайных погрешностей «шума» в линейные и угловые величины элементов внешнего ориентирования
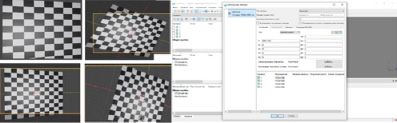
Рис. 4. Шахматное изображение и интерфейс «Добавление параметров калибровки камеры через Agisoft Metashape»
В таблице 3 представлены результаты имитационного моделирования «аэрофототопографической съемки» с данными о внесенных случайных отклонениях в координаты центров проекции для четырех вариантов взаимных перекрытий снимков и маршрутов при аэрофотографировании эталонной модели с высоты 260 м, что обеспечивало проекцию пикселя снимка на поверхности этой модели порядка 7 см. Обработка данных моделирования съемки осуществлялась в среде Agisoft MetaShape.
Таблица 3
Результаты имитационного моделирования «аэрофототопографической съемки»
|
Вариант съемки |
1 |
2 |
3 |
4 |
|
Перекрытие снимков – Px / Py, % |
70/45 |
80/60 |
90/70 |
90/90 |
|
Количество маршрутов |
5 |
5 |
7 |
10 |
|
Общее количество снимков |
85 |
141 |
316 |
451 |
|
Время обработки в Metashape (час: минут: секунд) |
0: 14: 05 |
0: 23: 13 |
0: 57: 24 |
1: 55: 26 |
|
СКО вносимых отклонений в плановые координаты точек фотографирования (δXф, δYф), метр |
±5 (15)* |
±5 (15) |
±5 (15) |
±5 (15) |
|
СКО вносимых отклонений по высоте точек фотографирования (δZф), метр |
±5 (30)* |
±5 (30) |
±5 (30) |
±5 (30) |
|
СКО угловых элементов внешнего ориентирования – α, β, К, град. |
±3 (10) |
±3 (10) |
±3 (10) |
±3 (10) |
|
СКО на контрольных точках (в плане/высоте), метр |
0,24/0,18 |
0,22/0,19 |
0,23/0,18 |
0, 21/0,16 |
Примечание: в скобках приведено максимальное значение.
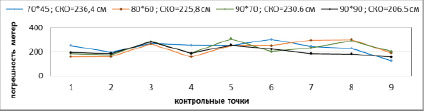
Рис. 5. Влияние изменений перекрытий на точность метрики конечной модели
График, приведенный ниже (рис. 5), показывает распределение ошибок в плановых координатах конечной модели по 9 контрольным точкам для всех вариантов съемочных параметров.
Из данных таблицы и графика следует, что с увеличением перекрытия снимков точность создания конечной модели увеличивается незначительно, что может быть объяснено тем, что при больших введенных колебаниях значений внешнего ориентирования снимков уменьшалась вероятность пропуска перекрытий в целом. Но при этом резко возрастает количество снимков и, как следствие, увеличивается время их фотограмметрической обработки.
Более подробное рассмотрение результатов имитационного моделирования аэрофототопографической съемки с борта квадрокоптера DJI Phantom 4 Pro нами изложено в работе [13]. Далее мы остановимся на имитационном моделировании процесса съемки местности лазерно-локационными средствами, а также на результатах имитационного моделирования при комбинировании аэрофотосъемки с лазерным сканированием.
Моделирование процесса создания ЦММ по данным лазерного сканирования
Исходными данными для имитации лазерно-локационной съемки является та же территория, которая служила базовой для моделирования аэрофототопографической съемки.
Аналогичным образом был привлечен для моделирования лазерный сканер, приспособленный для использования на платформах малогабаритных БВС. Использованы параметры российского лазерного сканера АГМ-МС1 от компании «АГМ Системы». Сканер отличается малым весом, что позволяет в зависимости от задач устанавливать его на различные летательные аппараты, в том числе БВС любого типа. Основные характеристики представлены в таблице 4 [14].
Таблица 4
Характеристики воздушного лазерного сканера АГМ-МС1
|
Частота сканирования |
600 кГц |
|
Максимальная дальность |
200 м |
|
Угол поля зрения |
360 град |
|
Скорость вращения сканирующего зеркала |
20 об/сек |
|
Точность определения дальности |
3 см |
|
Точность определения координат |
3–5 см |
|
Размеры сенсорного блока |
120х116х112 мм |
|
Вес сенсорного блока |
1,2 кг |
|
Источник питания |
9–18 V, 1,3 A |
|
Температура использования |
–10...+50°C |
Визуализация и экспорт данных
Результатом имитационного моделирования аэросъемки и лазерно-локационной съемки является облако точек. Для обработки и визуализации в других программах требуется экспорт в виде сохраняемого файла. Облако точек состоит из записей данных для каждой точки, каждая из которых содержит следующую информацию: положение точки в пространстве (координаты X, Y и Z), семантическую метку, интенсивность измерения точки, спектральную яркость точки, расстояние между датчиком и поверхностью объекта.
Данные ВЛС в ПО Blender можно экспортировать другие программные средства посредством файлов в формате – *.ls, *.hdf, *.csv.
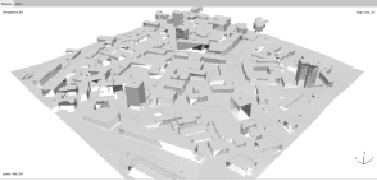
Рис. 6. Облако ТЛО, полученных при моделировании лазерно-локационной съемки кампуса МИИГАиК
На рисунке 6 показан результат имитационного моделирования процесса лазерного сканирования той же области с помощью симулятора лазерного сканера типа АМГ-СМ1, который представляет собой облако точек (кампус МИИГАиК), экспортированное с инструментарием программы Blender в специализированное ПО «CloudCompare» для обработки и визуализации.
В результате моделирования процесса сканирования с высоты, как и при аэрофотосъемке (185 м), было получено облако ТЛО в количестве 9 513 469 точек, среднее расстояние между которыми равно 20 см, то есть порядка 25 точек на 1 кв. м. Оценку точности полученной модели производили по разности двойных измерений расстояний по горизонтали и по высоте между характерными точками на первичной (эталонной) модели и теми же точками на модели, полученной по данным лазерно-локационной съемки.
Оценка точности измерений по способу разности двойных измерений [15]:
Δdi = dLi – dSi,
где dLi – измерения расстояний в модели, полученной лазерным сканером;
dSi – измерения расстояний в модели, полученной аэрофотосъемкой.
Для оценки точности используется формула Гаусса, средняя квадратическая ошибка рассчитывается как:
 ,
,
где n – число двойных разностей.
На рисунке (7) представлены разности в измерениях горизонтальных (di) и вертикальных (hi) дальностей (лазерным сканером и аэрофотосъемкой).
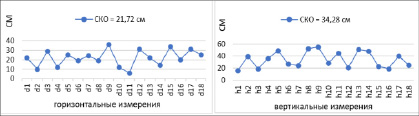
Рис. 7. Разности измерений горизонтальных и вертикальных линий для ЛС и АФС
Схема технологии имитационного моделирования воздушных съемок
Для выбора оптимальных аэросъемочных параметров нами проведены эксперименты в рамках имитационного моделирования, в ходе которых фиксировались практически все текущие навигационные и съемочные параметры, а отклонения, возникающие при изменении параметров во время полета, будут учитываться в процессе обработки. На рисунке 8 представлена схема, которая позволяет выявить и учесть влияние изменений каждого навигационного и съемочного параметра на конечную точность и производительность создания ЦММ.
При моделировании аэросъемки значения съемочных навигационных параметров будет изменяться оператором во время моделирования. В реальности точность будет зависеть от типа и состава используемого оборудования, а также от условий съемки и характера местности.
К изменяемым параметрам, которые влияют на точность итоговой модели, относятся:
– координаты центров проекций съемочного прибора (X, Y, Z);
– высота съемки (Нф);
– угловые элементы внешнего ориентирования съемочного прибора (α, ω, к);
– фокусное расстояние камеры (f);
– погодные условия, которые влияют на скорость и устойчивость воздушного средства, а также на искажения лазерного луча и изображения камеры;
– точность ГНСС оборудования на борту БВС, в том числе при использовании дифференциальной системы позиционирования (DGPS) в режиме (RTK);
– количество опорных точек (ОТ), контрольных точек (КТ), их расположение и т.д.
При моделировании процесса аэросъемки точность навигационных параметров изменяется во время эмулирования. В реальности отклонение зависит от типа и состава используемых инструментов, а также от условий съемки, характера застройки и рельефа местности.
Формально каждый имитационный эксперимент удобно описать «статусом состояния» F = [G, R, I, А, P, ОР, Н], в котором его составляющие отражают условия моделирования процесса создания ЦММ, как это представлено в таблице 4. Варианты значений или отсутствие одного или нескольких из этих составляющих при записи полетных данных для дальнейшей обработки представлены ниже.
Можно еще добавить некоторые параметры, которые влияют на итоговый результат.
Очевидно, что лучший результат получается, когда все компоненты вектора F равны единице: F = [1, 1, 1, 1, 1, 1, 1].
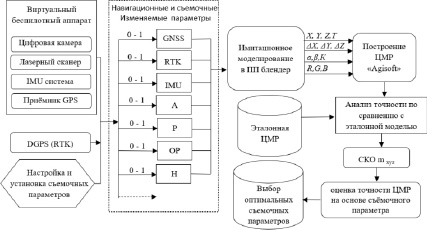
Рис. 8. Общая схема экспериментальных модельных съемок
Таблица 4
Параметры, влияющие на точность создания ЦММ
|
GNSS(G) |
RTK (R) |
IMU (I) |
Углы (A) |
Оп. Конт. точки (ОТ) (КТ) |
Высота (Н) |
GSD (P) |
|
|
Да |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
Нет |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
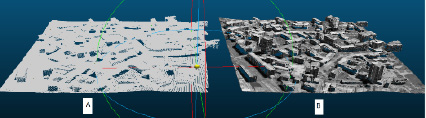
Рис. 9. Облака точек, сделанных с помощью: А) лазерного сканера, В) аэрофотосъемки
Это значит, что сигнал GPS устойчивый и включен режим РТК, инерциальная система (IMU) работает стабильно, угловые элементы внешнего ориентирования точные (А), съемка проводится на заданной высоте (Н) относительно снимаемой поверхности (p), количество опорных и контрольных точек (ОР) достаточно. В таком случае ошибки построения конечной модели будут сведены к минимуму.
Если один или несколько составляющих вектора F будут равны нулю, это означает, что некоторые данные, необходимые для обработки, не будут использованы, что повлечет за собой снижение точности конечного продукта.
В условиях полевых съемочных экспериментальных работ варианты комбинаций, настраиваемые съемочнные параметры могут оказаться бесконечными, а это потребовало бы много времени и значительных затрат на проведение летно-съемочных работ. Именно по этой причине предлагается реализация имитационного моделирования процесса съемки в программной среде Blender 3.0 с возможностью получить как модели снимков или облака ТЛО, так и результат их обработки – трехмерную модель местности. Оператор при эмулировании аэросъемки в компьютерной среде имеет возможность регулировать и устанавливать изменение навигационных параметров для каждого варианта съемки в пределах одной и той же территории в соответствии с тем фактором, влияние которого на точность построения ЦММ необходимо изучить.
Приведем пример – две модели облаков точек одного участка на рисунке 9 .
Первая модель выполнена на основе аэрофотосъемки с вектором состояния F1, а вторая – на основе лазерного сканера с вектором состояния F2; F1 = F2 = [1, 1, 1, 1, 1, 1, 1].
Таким образом, оператор при эмулировании аэросъемки в компьютерной среде имеет возможность регулировать и устанавливать изменение набора навигационных параметров для каждого варианта съемки в пределах одной и той же территории в соответствии с теми факторами, влияние которых на точность построения ЦММ необходимо оценить.
Выводы
На основании проведенных экспериментов можно сделать следующие выводы.
Основной вывод исследования заключается в том, что имитационное моделирование аэрофототопографических работ в программных средствах типа Blender-3 дает корректные, предсказуемые (ожидаемые) результаты и позволяет профессионально ставить экспериментальные работы по аэрофотосъемке местности, заменяя натурные сложные эксперименты, экономя время, затраты на оборудование и накладные расходы, как правило, сопровождающие реальные полевые аэрофотосъемочные работы.
Результаты моделирования дают возможность сделать вывод, что различные программные средства для фотограмметрической обработки данных съемки создают весьма близкие по точности цифровые модели местности и могут влиять только на общую производительность аэрофототопографических работ в целом.
Предлагаемая методика имитационного моделирования может быть рекомендована как средство обучения на курсах, связанных с технологиями летно-съемочных работ для целей картографирования территорий в крупных масштабах.
Библиографическая ссылка
Алтынов А.Е., Мохаммад Акель Амин Исследование влияния вариаций навигационных параметров съемочной системы (аэрофотосъемки, лазерного сканера) на точность создания ЦММ с помощью имитационного моделирования // Успехи современного естествознания. 2022. № 5. С. 110-120;URL: https://natural-sciences.ru/ru/article/view?id=37833 (дата обращения: 24.06.2026).
DOI: https://doi.org/10.17513/use.37833