



Число задач, где требуются достаточно точные ЦММ (ЦМР), постоянно расширяется, выходя далеко за рамки традиционной геодезии и картографии. Для небольших по площади территорий они решаются как традиционными полевыми съёмками, так и методами наземного лазерного сканирования. Когда площади территорий съёмки превышают некоторый предел (примерно один квадратный километр), наиболее производительными становятся методы аэрофототопографии, которые дополняются сегодня технологиями воздушного лазерного сканирования (ВЛС). С широким внедрением методов съёмок с борта беспилотных авиационных систем (БАС) и совершенствованием программного обеспечения фотограмметрической обработки результатов съёмки, аэрофототопографические методы практически вытесняют традиционные, позволяя получить в конечном итоге модели рельефа с высокой точностью при очень высокой рентабельности.
Многие исследования [1–3] показывают, что аэрофототопографический метод на основе использования данных с БАС является оптимальным по совокупности многих параметров – доступности и простоты реализации, пространственного разрешения, комплексности автоматизации и суммарных затрат. С ним может конкурировать только метод воздушного лазерного сканирования. Но плотность точек в моделях, полученных по данным ВЛС, всегда будет уступать моделям, полученным по данным аэрофототопографической съёмки при тех же расстояниях. Кроме того, в методах на основе использования ВЛС всегда будет необходимость в «заполнении текстурами и цветом» пространства между точками лазерных отражений. Эти обстоятельства привели к тому, что эти два метода при возможности объединяются, но существенно усложняют технологию создания ЦММ, значительно увеличивая затраты на её воспроизведение.
Отдавая предпочтение аэрофототопографическому методу вследствие его высокой рентабельности – минимальных затрат, отнесенных к единице площади территории, следует сказать, что для получения максимальных показателей точности ЦММ в этом методе требуется тщательный расчет и обоснование аэросъёмочных параметров и их строгое выдерживание в процессе съёмки.
Цель исследования – представить метод и рекомендации, основанные на экспериментах, имитирующих процессы аэрофотосъёмки, которые позволят оптимизировать (улучшить) процесс создания ЦМР аэрофототопографическим методом с использованием БВС «бюджетного уровня». Все результаты получены на основе проведенных в программе компьютерного имитационного моделирования процессов аэрофотосъемки с использованием различных вариаций параметров.
Материалы и методы исследования
Среда моделирования. Для детального анализа всех факторов и аэросъёмочных параметров, влияющих на качество конечного продукта, авторами поставлен многоплановый эксперимент съёмок с борта БАС, реализация которого осуществлялась в режиме имитационного моделирования всех стадий получения ЦММ в среде программного комплекса «Blender 3.0». Среди многочисленного семейства программных средств для трехмерного моделированиям реальности, таких как Autodesk 3dsMax, ZBrash, DAZStudio, MeshLab и ряда других, среда 3D моделирования Blender выделяется универсальностью применения и уникальными возможностями подключения программных средств для выполнения «внутренних» процедур выполнения необходимых процессов в цепочке моделируемой технологии и доступностью для широкого круга пользователей. Являясь профессиональным, свободным (не проприетарным) и открытым программным обеспечением для создания трёхмерных компьютерных моделей, ПО Blender в настоящее время пользуется большой популярностью среди бесплатных 3D-редакторов в связи с его быстрым стабильным развитием и хорошей технической поддержкой.
Для авторов важно, что среда моделирования Blender позволяет спроектировать корректную схему залетов, учесть влияние погрешностей в фиксируемых координатах центров проекций снимков и в известные элементы внутреннего ориентирования камеры, включая дисторсию, на точность создаваемой по снимкам ЦММ, и подбирать оптимальные установки съёмки, и выявлять конфигурацию расположения необходимого количества опорных точек в зависимости от сложности ситуации, что позволит получить ЦММ (ЦМР) высокой точности и качества [4].
Объект съёмки. Реализация имитационного моделирования топографической АФС местности предполагает выбор территории с необходимыми объектами, а также наличием геометрических характеристик и метрической точностью её описания. Последнее является ключевым, поскольку модель территории нами по замыслу эксперимента считается эталоном, с которым мы будем сравнивать производные модели «этой местности», получаемые в процессе моделирования её по результатам различных вариантов аэрофототопографической съёмки [4]. На рис. 1 представлен фрагмент изображения трехмерной модели территории центра Москвы размером 1,2 х 1,0 км, принятой нами за «эталонную», которая характеризуется следующими параметрами: модель поверхностная на прямоугольной сетке с дискретностью 0,3 м, максимальный перепад высот – 65 м.

Рис. 1. Слева 3D-модель центра г. Москвы в ПО Blender; справа космический снимок этой территории
Программное обеспечение для фотограмметрической обработки снимков. Еще одним из чрезвычайно важных исходных условий моделирования является выбор одного или нескольких вариантов программ фотограмметрической обработки, которые подключаются в схему моделирования, аэрофототопографического метода создания ЦММ. Из полутора десятков программных продуктов, широко применяемых и востребованных для этих целей в России и за рубежом: MetaShape, PhotoMod, Pix4Dmodel, ReCap 360, 3DF Zephyr Pro, ContextCapture, COLMAP, Reality Capture и пр. – для исследования были выбраны три пакета в последних версиях. Авторами кратко проанализирован и охарактеризован функционал выбранных на проработку программ фотограмметрической обработки данных модельных съёмок.
Первой и по существу основной авторы выделяют российскую программу MetaShape компании Agisoft, в которой реализована современная технология построения трехмерных моделей объектов на основе фотограмметрической обработки стереопар цифровых фотоснимков. Для реконструкции 3D-модели объекта ПО Agisoft MetaShape могут использоваться цифровые фотоснимки с перекрытием, полученные любыми цифровыми фотокамерами с любых ракурсов. Процесс создания трехмерной модели полностью автоматизирован [5]. Масштабирование модели производится на основании предварительных определений координат опорных точек в пределах реконструируемого объекта съемки. В последнее время это очень распространённое приложение, используемое как в России, так и за её пределами, в профессиональной сфере – аэрофототопографическая съёмка, 3D-моделирование, ЦММ, ЦМР и пр.
Из зарубежных программ от компании Bentley (США) использовали пакет Contex Capture, который представляет новую технологию, не требует обязательного привлечения высококвалифицированных специалистов по аэрофототопографии, а делает процесс получения и обработки данных доступным всем заинтересованным лицам. Это инновационное решение значительно упрощает получение пространственных данных об изучаемых объектах, поскольку для этого пригодны обычные фотоснимки, полученные любой цифровой камерой, будь то камера, установленная на беспилотном летательном аппарате, или цифровой фотоаппарат общего назначения. Точность модели в реальности ограничивается только линейным разрешением исходных фотографий.
Важно, что ПП Contex Capture допускает достижение точности, близкой к точности лазерного сканирования. Получение данных посредством лазерного сканирования может быть затруднено в некоторых случаях, а иногда невозможно – например, при создании модели большого региона. Данные, обработанные в Contex Capture, можно размещать в облачных продуктах. Размер модели, формируемой в Contex Capture, в десятки раз меньше, чем размер модели, полученной с помощью лазерного сканирования.
Также следует выделить программный продукт Pix4D швейцарского института EPFL, который используется для обработки аэрофотоснимков и получения точных 3D-моделей, ЦММ, ЦМР и ортофотопланов. Данное приложение обрабатывает большие объёмы данных и выполняет это быстрее, чем такие программы, как Agisoft или Context Capture.
Таблица 1
Характеристики Phantom 4
|
Квадрокоптер с Мобильной станцией DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo |
|
|
Взлетный вес |
1391 г |
|
Макс. высота полета |
6000 м |
|
Макс. время полета |
до 30 мин |
|
Объектив съёмочной камеры |
угол обзора 84°: 8,8 мм / 24 мм (35-мм эквивалент), f/2.8-f11 |
|
Выдержка |
Электронный: 8-1/8000 с, Механический: 8-1/2000 с |
|
Размер изображения |
5472×3648 |
|
Стабилизация |
3-осевая (наклон, поворот, сгибание) |
|
Контролируемый диапазон |
Наклон: от -90° до +30° |
|
Макс. контролируемая угловая скорость |
Наклон: 90 °/с |
|
Угловая точность управления |
± 0,02° |
И, наконец, ещё один из привлеченных авторами в исследования ПП – Reality Capture – с которым можно обрабатывать данные гораздо быстрее других и задействовать огромные количества изображений на обычном компьютере. Reality Capture превосходит другие ПО благодаря функции быстрого ориентирования снимков, разрешающей построить фотограмметрическую модель за короткий промежуток времени. Это важный инструмент, он хорош для проверки данных сразу на месте съёмки для уточнения, что изображений достаточно и нет пропусков на поверхности оригинала.
Платформы БАС. Выбор беспилотной авиационной системы зависит от типа задачи и её условий, вида получаемых материалов, размеров, местоположения и типа местности объекта съёмки, а также необходимой точности и плотности измерений и, конечно, от метеоусловий. При моделировании авторы использовали малоразмерные БАС, способные нести полезную нагрузку до 2,5 кг. Предпочтение отдавалось моделям вертолетного типа (мультикоптерам) или самолётного типа – летающее крыло [4].
Мультироторные системы часто могут нести большую полезную нагрузку, что позволяет использовать различные типы приборов в разнообразных комбинациях. Благодаря способности летать с малыми скоростями на малых высотах, мультироторные системы позволяют получить снимки практически без сдвига на изображения, в связи с чем они больше подходят, когда требуется получение материалов с очень высокой точностью и отображением мелких деталей поверхности (микрорельефа) модели. Важно и то, что они также могут взлетать и приземляться на небольшой территории, не подвергая съёмочную аппаратуру ударным нагрузкам при приземлении. Однако производительность их ограничена вследствие относительно низкой скорости полета и большого энергопотребления.
БАС самолетного типа больше подходят для съемки больших площадей и большей производительности благодаря большим скоростям движения носителя. Но высокие скорости полета до 80 км/ч ведут к недопустимым величинам деформации изображения, а приземление их на парашюте неизбежно подвергает ударным нагрузкам съёмочную аппаратуру.
Отметим, что в настоящее время на рынке БАС появляются летательные аппараты – конвертопланы (VTOL системы), комбинирующие в себе преимущества мультироторных систем и БАС самолетного типа.
В исследованиях авторы использовали данные модели БАС – DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo c пилотажно-навигационным оборудованием четвертого поколения и мобильной станцией для RTK. В табл. 1 приведены основные параметры и данные фототосъёмочной системы при имитационном моделировании [6].
Экспериментальное моделирование АФС и некоторые результаты
Особенность компьютерного моделирования аэросъемочных процессов в исследовании авторов заключается в возможности многовариантного выполнения аэрофотосъёмочных работ с внесением систематических или случайных отклонений в заданные значения параметров аэрофотосъемки с фиксацией этих параметров для всех точек фотографирования. Это позволяет определить, какие именно группы аэрофотосъемочных параметров и их изменения существенно влияют на точность построения трехмерных моделей эталонной территории с помощью фотограмметрического инструментария. Таким образом можно произвести моделирование достаточно большого количества вариантов выполнения с различными параметрами, которые, по мнению авторов, могут существенно повлиять на точность итогового результата в построении ЦММ. Прежде всего, это:
- точность определения элементов внешнего и внутреннего ориентирования снимков;
- точность выдерживания траектории движения БВС;
- выдерживание расчетных продольного и поперечного перекрытий снимков;
- количество, точность определения и расположение опорных и контрольных точек;
- особенности используемых программ фототопографической обработки;
- пространственное разрешение изображений и т.д.
Все перечисленные параметры и их значения, «зашумленные» заданным уровнем погрешностей, были использованы при многовариантном имитационном моделировании технологического процесса создания цифровой модели местности, по результатам которого авторы апробировали метод выявления оптимальных условий проведений летно-съёмочного процесса для получения приемлемых по точности результатов.
Первым шагом в имитационных экспериментах, очевидно, был этап проектирования аэрофототопографических работ, который включал определение высоты и масштаба фотографирования при заданных параметрах съёмочной камеры, а также расчет аэрофотосъёмочных элементов – положения точек фотографирования, продольного и поперечного базисов фотографирования, числа снимков в маршрутах и количество маршрутов съёмки. Высота фотографирования определяет пространственное разрешение получаемых изображений, охват местности снимками, поперечные и продольные базисы фотографирования, общее количество снимков и, как следствие, продолжительность и производительность съёмки. Высоту полета авторы устанавливали исходя из заданного размера проекции пикселя на поверхности (англ. Ground Sample Dastans – GSD – близкую к линейному разрешению снимков) учитывая при этом отношение перепада высот местности к высоте съёмки. Задавая значение GSD при известном фокусном расстоянии фотосистемы fk, высоту фотографирования можно определить из выражения [7]:
Нф = 2R · GSD · fк / δ, (1)
Нф – высота фотографирования относительно заданной поверхности (м);
fк – фокусное расстояние фотосистемы (м);
GSD – проекция пикселя матрицы ЦАФА на заданной поверхности (м);
R – разрешение на матрице (цикл /пиксель);
δ – размер пикселя матрицы (м).
Важным вопросом у авторов в исследованиях было установление количества и расположение опорных точек для внешнего ориентирования и масштабирования модели и контрольных точек, по которым авторы на всех этапах экспериментальных работ оценивали точность построения конечной модели, а значит, качество работ.
По результатам первичных расчетов применительно к задаче создания ЦММ первичной (эталонной) модели местности (рис. 1) были приняты следующие значения летно-съёмочных параметров для первого варианта съёмки: высота фотографирования 260 (или 520) м, при перепадах высот до 65 м, продольное перекрытие с учетом рельефа 78 %, поперечное 45 %. Количество опорных точек – 5, контрольных – 9. Их расположение представлено на рис. 2.

Рис. 2. Расположение опорных (в красном круге) и контрольных (в жёлтом квадрате) точек на территории съёмки
Применяемая авторами для имитационного моделирования аэрофотосъёмки платформа DJI Phantom 4 RTK + D-RTK, как известно, имеет в своем составе «неметрическую» съёмочную камеру с фокусным расстоянием 8,8 мм [8]. Одна из первых задач имитационного моделирования АФС состояла в том, чтобы выявить влияние на точность формируемой ЦММ при съёмке некалиброванной камеры (а), использование предварительно откалиброванной камеры в лабораторных условиях (б), использование некалиброванной камеры в режиме обработки данных съёмки методом «самокалибровки» (в), а также комбинация этих условий [9].
На рис. 3 представлен очевидный результат в построении фотограмметрической модели по данным, полученным камерой с известными элементами внешнего ориентирования (а) и без них (б), что показывает корректную работу среды моделирования для реализации аэрофототопографического метода.
На рис. 4 представлены значения среднеквадратических отклонений (СКО) полученной модели относительно эталонной по высоте на девяти контрольных точках при разных вариантах использования съёмочной камеры. Здесь и далее геометрическая точность построения ЦММ, получаемая авторами в имитационных экспериментах, оценивалась по разнице между эталонным значением и конечным результирующим моделированием на контрольных точках (КТ), по формулам (2) оцениваем итоговую точность; теоретически чем ниже значение СКО, тем точнее будет матрица высот [10].
 , (2)
, (2)
где СКОx,y и СКОz – среднеквадратичная ошибка по плану (x, y) и высоты (z) соответственно;
xci, yci и zci – координаты i-й КТ, а xvi, yvi, zvi – результаты измерений на контрольных точках.

Рис. 3. Результат обработки снимков с известными значениями ЭВО (а), без параметров калибровки (б)
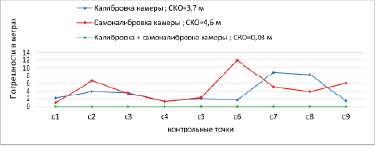
Рис. 4. Влияние параметров калибровки камеры на результаты получаемой модели
Особое внимание было уделено исследованию влияния на точность конечной модели аэросъёмочных параметров – высоты полёта и перекрытий снимков. Проведенные разными авторами эксперименты по оценке точности ЦМР с использованием аэрофотосъемки на БВС при разных высотах показали, что ошибки в определении координат практически не изменялись, пока GSD оставалась постоянной, и имели тенденцию к увеличению с увеличением GSD [11].
Это хорошо согласуется с результатами моделирования в работе авторов данной статьи, где имитирована аэросъёмка на разных высотах с внесением случайных изменений выдерживания высоты полета, углов наклона снимков и определения координат центров проекций снимков. На рис. 5 показан интерфейс программы «Blender 3.0», где в различных окнах программы выставлены расчетные параметры АФС и один из графиков вносимого случайного гауссового отклонения в координату высоты полета. Так, изменение заданной высоты фотографирования авторами было запрограммировано в пределах 260 м ±10 м с максимальной погрешностью в 30 м. При этом фиксирование линейных элементов внешнего ориентирования снимков «колебалось» в пределах ±5 м с максимальным значением до 15 м. Одновременно вносились случайные изменения в угловые элементы внешнего ориентирования снимков как следствие угловых эволюций БАС, которые задавались в пределах ±3° с максимальным отклонением до 10° [3].
В табл. 2 представлены результаты имитационного моделирования аэрофототопографической съёмки с данными о внесенных случайных отклонениях в координаты центров проекции, заданные для четырех вариантов взаимных перекрытий снимков и маршрутов при аэрофототопографии эталонной модели с высоты 260 м, что обеспечивало проекцию пикселя снимка на поверхности этой модели порядка 7 см. Обработка данных моделирования съёмки осуществлялась в среде Agisoft MetaShape [4].

Рис. 5. Установки параметров съёмки и добавление случайных погрешностей «шума» в выдерживании высоты фотографирования в ПО (пояснения в тексте)
Таблица 2
Результаты имитационного моделирования с вариантами перекрытия
|
Вариант съёмки |
1 |
2 |
3 |
4 |
|
Перекрытие снимков – Px / Py, % |
70/45 |
80/60 |
90/70 |
90/90 |
|
Количество маршрутов |
4 |
5 |
7 |
10 |
|
Общее количество снимков |
85 |
141 |
316 |
451 |
|
Время фотограмметрической обработки в ЦФС «Metashape”, (час: минут: секунд) |
0: 14: 05 |
0: 23: 13 |
0: 57: 24 |
1: 55: 26 |
|
СКО вносимых отклонений в плановые координаты точек фотографирования (δXф , δYф), метр |
±5 (15)* |
±5 (15) |
±5 (15) |
±5 (15) |
|
СКО вносимых отклонений по высоте точек фотографирования (δZф), метр |
±10 (30)* |
±10 (30) |
±10 (30) |
±10 (30) |
|
СКО угловых элементов внешнего ориентирования – α, β, К, град. |
±3 (10) |
±3 (10) |
±3 (10) |
±3 (10) |
|
СКО на контрольных точках (в плане δX, δY / высоте δZ), метр |
1,54/1,8 |
1,17/1,92 |
1,36/1,83 |
1,28/1,62 |
Примечание: * – в скобках максимальное значение.
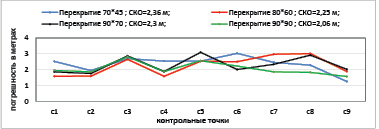
Рис. 6. Влияние перекрытий на точность конечной модели
Таблица 3
Сравнение точности и времени трёх программ
|
Количество точек |
Точность на модели СКО (пиксель) |
Время обработки |
|
|
Agisoft Metashape |
1 605 896 |
0,23 |
3h 24m 55s |
|
Pix4D |
1 444 425 |
0,5 |
1h 31m 03s |
|
Reality Capture |
590876 |
0,89 |
0h 50m 15s |
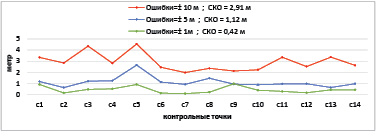
Рис. 7. Погрешности создания модели на контрольных точках в зависимости от введенных случайных ошибок в определении центров фотографирования в режиме RTK при отсутствии опорных точек
Рисунок 6 показывает ошибки в плановых координатах модели по контрольным точкам для разных вариантов съемочных параметров.
Из данных графика и таблицы видно, что с повышением процентов перекрытия снимков точность создания конечной модели незначительно увеличивается, при этом резко возрастает количество снимков и, как следствие, происходит увеличение времени их фотограмметрической обработки.
В этой связи при имитационном моделировании получен интересный результат относительно производительности выбранных трех ЦФС для обработки вариантов модельных съёмок, представленный в табл. 3.
При имитационном моделировании процесса аэрофототопографической съёмки выявляются зависимость точности позиционирования (привязки к геодезической СК) создаваемой модели от количества и расположения опорных точек (ОТ) или использования координат центров проекции снимков (центров фотографирования), получаемых при использовании данных базовых станций ГНСС при производстве фотосъёмки. Последний вариант наиболее актуальный, поскольку сегодня практически все съёмки ведутся в режиме RTK. На рис. 7 представлены результаты погрешностей позиционирования создаваемой модели по данным аэрофотосъёмки в режиме RTK для трех вариантов точности фиксирования точек фотографирования съёмочной аппаратуры.
Из анализа результатов, представленных на графиках рис. 7, можно сделать вывод, что погрешности модели на контрольных точках пропорциональны значениям специально введенным погрешностям определения центров фотографирования.
Ещё одним важным результатам имитационного моделирования было выявление значимости точности построения модели в зависимости от высоты фотографирования, то есть от размера проекции пикселя снимка на поверхности эталонной модели местности. На рис. 8 представлены графики погрешностей создания модели (относительно эталона) в зависимости от высоты фотографирования.
Из графика (рис. 8) видно, что погрешности, полученные на контрольных точках созданной модели, увеличиваются с увеличением GSD. В том случае, если использовать фотосистемы с увеличенным фокусным расстоянием пропорционально изменению высоты, то погрешности на контрольных точках модели практически не изменяются. Следовательно, для увеличения эффективности работ необходимо определить максимальную высоту, на которой возможно получить изображения с допустимым значением GSD, позволяющим обнаружить необходимые детали на поверхности [11].
В ходе исследовательских работ перед авторами стояла задача апробировать комбинирование плановой аэросъёмки и аэросъёмки с тех же точек с небольшими углами наклона «вправо-влево» и «вперед-назад» с борта БАС вертолетного типа с зависанием на точке фотографирования и получения пяти снимков, как показано на рис. 9. Углы наклона рассчитывались из условия получения перекрытия планового снимка с наклонами не менее 30 %.
Полученные при этом результаты хорошо согласуются с работами ряда авторов [12, 13], где точность конечной модели по результатам обработки совокупности плановых и наклонных снимков несколько выше, но при этом время обработки такого массива снимков значительно увеличивается.
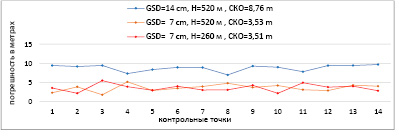
Рис. 8. Погрешности, вызванные ошибками координат в центрах фотографирования и в определениях КТ на разных высотах и пространственных разрешениях GSD
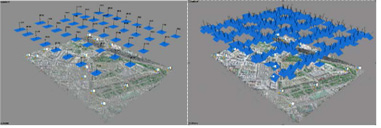
Рис. 9. Результат аэрофотосъёмки: а) плановая съемка б) съемка в пяти направлениях
Выводы
На основании экспериментов с использованием имитационного моделирования аэрофототопографического метода для получения ЦММ и ЦМР территорий, можно сделать следующие выводы:
А. Основной вывод заключается в том, что имитация процесса аэрофототопографических работ в программе типа «Blender-3» дает точные, корректные результаты, что позволяет ставить экспериментальные работы по аэрофотосъемке на местности, заменяя полевые эксперименты, экономя время и затраты.
Б. Компьютерное моделирование подтвердило, что использование наряду с плановыми снимками наклонных снимков, как это реализуется в современных цифровых аэрофотоаппаратах с веерным расположением камер, существенно повышает точность ЦММ с улучшением качества передачи элементов модели, имеющих больший угол наклона.
В. Результаты моделирования и обработки показывают, что разные программы фототопографической обработки дают близкие по точности результаты построения ЦММ и ЦМР и разность между ними только влияет на общую производительность и время обработки в целом.
Г. Авторы рекомендуют использование методов компьютерного 3D-моделирования для выявления наиболее рациональных вариантов проведения топографической аэрофотосъёмки для создания цифровых моделей местности и других документов по территориям.
Библиографическая ссылка
Акель Мохаммад Амин, Акл Магер Нассер, Алтынов А.Е. ИСПОЛЬЗОВАНИЕ МЕТОДОВ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ ДЛЯ ПОИСКА НАИЛУЧШИХ РЕШЕНИЙ ПОЛУЧЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ МЕСТНОСТИ ПО ДАННЫМ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ // Успехи современного естествознания. 2022. № 8. С. 150-159;URL: https://natural-sciences.ru/ru/article/view?id=37882 (дата обращения: 17.07.2026).
DOI: https://doi.org/10.17513/use.37882