



Введение
Создание устойчивой геодезической сети в Ливане является актуальной задачей. Актуальность обусловлена тем, что часть пунктов существующей геодезической сети утрачена, и это нарушило целостность геодезического построения, а также наличие активной геодинамической составляющей на территории Ливана и близлежащих стран. Геодинамические процессы приводят к снижению точности геодезических станций, что напрямую влияет на точность геодезических работ.
В статье предлагается модель создания новых высокоточных опорных станций в Ливане с использованием глобальных навигационных спутниковых систем (GNSS). Разработанный подход позволит быстро и точно определять координаты вновь устанавливаемых и непрерывно действующих опорных станций (CORS).
На пунктах CORS в режиме реального времени будут определяться координаты, это обеспечит непрерывный мониторинг движения земной коры на территории Ливана, позволит корректировать координаты опорных пунктов после сейсмических событий или других геодинамических процессов.
Предлагаемая модель применения позиционирования высокой точности (PPP – Precise Point Positioning) обеспечит высокоточное позиционирование и в дальнейшем, при создании соответствующего национального сервиса – определение и транслирование дифференциальных поправок на определяемые методом PPP пункты. Сеть опорных станций сыграет ключевую роль в модернизации геодезической инфраструктуры Ливана, повысит точность измерений и поддержит различные специализированные приложения, включая управление земельными ресурсами, инфраструктурой и в проведении научных исследований [1–3].
Цель исследования – изучение применения метода точного позиционирования для определения координат базовых станций непрерывного действия в целях обновления геодезической сети и прогнозирования движения земной коры.
Задачи:
1. Подробно описать поэтапный процесс реализации метода РРР – от выбора мест установки и монтажа станций до выполнения обработки данных для получения точных координат определяемого пункта.
2. Определить соответствие метода позиционирования высокой точности требованиям, предъявляемым к точности опорных станций.
Материалы и методы исследования
Исследование проводилось в Ливане, в частности в деревне Райак, расположенной недалеко от г. Баальбек на востоке страны. Этот район был выбран ввиду его стратегического значения и геологических особенностей, имеющих отношение к целям исследования. Близость Райака к Баальбеку создает оптимальные условия для мониторинга геодезических и геодинамических процессов в регионе.
В методе PPP выполняют обработку информации, полученной с одного приемника, с применением дополнительной информации о точных спутниковых орбитах, о поправках часов, а также с применением дополнительных математических моделей, учитывающих влияние различных геофизических и геодинамических факторов (рисунок).
При этом выполняется оценка положения самого приемника, решение неоднозначностей, выявление смещений часов приемника и определение задержки во влажной тропосфере. PPP служит широкому спектру приложений, таких как точное позиционирование, зондирование водяного пара в атмосфере, мониторинг землетрясений и цунами, определение орбиты низкоорбитальных спутников и точного земледелия [4, 5].
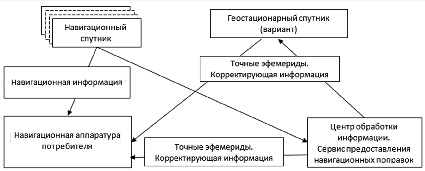
Обзор системы точного позиционирования (PPP) Источник: составлено авторами по результатам данного исследования
Было проведено исследование применения PPP для определения пунктов CORS. Метод PPP опирается на прямые наблюдения и точные эфемериды. Прямые наблюдения – это данные, которые GPS-приемник может получить самостоятельно, основной информацией является фаза несущей, дополнительной является дифференциальная задержка между сигналами GNSS разных частот, поэтому в основном в данном методе используют двухчастотные приемники. Точные эфемериды – орбиты спутников GNSS, определяемые геодезическим сообществом с использованием глобальных сетей наземных станций. Существуют «ультрабыстрые» орбиты примерно через 90 мин наблюдений, «быстрые», которые формируются за день-два, и «окончательные», которые определяются примерно за 14 дней. По времени, необходимому на подготовку точных эфемерид, можно сделать вывод, что только первые можно использовать в режиме реального времени, а два других типа – только в режиме постобработки. Для предоставления точных эфемерид, поправок в бортовые часы используются специальные сервисы, которые государство может подготовить самостоятельно или использовать общемировые. В настоящее время вся информация, необходимая для реализации метода PPP получается от европейской станции распространения навигационной информации. Необходима национальная служба и соответствующие сервисы для полноценной реализации данного метода.
Типичному решению PPP требуется определенный интервал времени для достижения заданной точности, чтобы устранить локальные ошибки, такие как атмосферное влияние, многолучевое распространение радиоволн и смещение приемника в ходе сеанса наблюдения. Фактическая достигнутая точность и необходимое время сходимости зависят от качества поправок и от того, как они применяются в процессе обработки получаемого сигнала [6, 7].
Метод PPP работает по следующей схеме:
− наблюдения – получение приемником навигационной информации;
− получение от специальных сервисов точных эфемерид, поправок в часы, корректирующих моделей и других поправок;
− применение корректирующей информации в режиме реального времени или в режиме постобработки;
− оценка определяемых параметров, координат и полученных редукций фильтром Калмана или методом наименьших квадратов в последовательной обработке [8].
Вектор определяемых параметров можно записать как
 , (1),
, (1),
где Xt , Yt , Zt – координаты приемника, обновляются с использованием фильтра Калмана;
dtt – смещение часов приемника, оценивается и корректируется с использованием точных данных о часах спутника;
Tt – задержка в тропосфере, моделируется и оценивается с использованием фильтра Калмана;
Nt – неопределенность фазы несущей, оценивается как плавающее значение, фиксируется как целое число в методе PPP-AR, с использованием фильтра Калмана.
− координаты приемника, определяются в геоцентрической системе координат на фиксированную эпоху. Метод PPP непрерывно уточняет координаты по мере поступления навигационной и эфемеридно-временной информации, до тех пор, пока не будет достигнута наилучшая возможная точность, процесс обработки завершается либо по достижении заданного периода времени, либо по завершению поступления навигационной информации от спутников;
− коррекция:
• часов приемников относительно часов спутников; в виде
 (2),
(2),
где c – скорость света, dtt – смещение часов приемника, dts – смещение часов спутника.
Смещение часов приемника рассматривается как неизвестный параметр, а ошибки часов спутника (dts) корректируются с использованием данных от IGS;
• тропосферной задержки:
Tt = Т«сухая» + Т«влажная» , (3),
где Тсухая – «сухая» составляющая (примерно 90 % от всей задержки, возможен расчет).
Твлажная – «влажная» составляющая (примерно 10 % от всей задержки, по моделям не рассчитывается). Если доступны данные о погоде в реальном времени, то коррекция может быть осуществлена в процессе обработки.
• неоднозначность измерения фазы несущей:
 (4),
(4),
где λi – это длина волны сигнала GPS; Nit – разности фаз; εϕ – это фазовый шум / ошибка.
GPS-приемники измеряют фазу несущего сигнала, данный метод значительно точнее, чем измерения по кодовым псевдодальностям. Однако между спутником и приемником существует неизвестное целое число полных циклов, называемое термином неоднозначности Nt, решение данной неоднозначности призвано сделать измерения точнее. Изначально Nit рассматривается как значение с плавающей запятой и оценивается с использованием фильтра Калмана. Если применяется разрешение неоднозначности (PPP-AR), оно фиксируется как целое число, что повышает точность до 1–5 см [9].
Функциональная модель PPP представляет собой явную связь между наблюдениями и неизвестными, недифференциальные уравнения наблюдений представлены в следующем виде [10]:
 (5)
(5)
 (6)
(6)
где  и
и  – уравнения псевдодальности и фазы несущей соответственно, на частоте Li; ρ –геометрическое расстояние между спутником и приемником в метрах, dorb – ошибка орбиты спутника в метрах, с – скорость света в вакууме, м/с; dT и dt – погрешность часов спутника и приемника соответственно, в секундах;
– уравнения псевдодальности и фазы несущей соответственно, на частоте Li; ρ –геометрическое расстояние между спутником и приемником в метрах, dorb – ошибка орбиты спутника в метрах, с – скорость света в вакууме, м/с; dT и dt – погрешность часов спутника и приемника соответственно, в секундах;  ионосферное влияние первого порядка на частоту Li в метрах; dtrop задержка в тропосфере, в метрах;
ионосферное влияние первого порядка на частоту Li в метрах; dtrop задержка в тропосфере, в метрах;  и
и  – аппаратные задержки спутника и приемника для псевдодальности соответственно, на частоте Li, в метрах;
– аппаратные задержки спутника и приемника для псевдодальности соответственно, на частоте Li, в метрах;  и
и  аппаратные задержки спутника и приемника соответственно, для фазы несущей Li, в метрах;
аппаратные задержки спутника и приемника соответственно, для фазы несущей Li, в метрах;  и
и  ошибки многолучевого распространения псевдодальности и фазы несущей соответственно, на частоте Li, в метрах;
ошибки многолучевого распространения псевдодальности и фазы несущей соответственно, на частоте Li, в метрах;  и
и  – шумовые ошибки псевдодальности и фазы несущей соответственно на частоте Li, в метрах;
– шумовые ошибки псевдодальности и фазы несущей соответственно на частоте Li, в метрах;  – целая неоднозначность фазы на частоте Li, в циклах; λLi длина волны частоты Li, в метрах.
– целая неоднозначность фазы на частоте Li, в циклах; λLi длина волны частоты Li, в метрах.
Традиционные безыоносферные линейные комбинации псевдодальности и фазы несущей являются наиболее известными наблюдаемыми величинами, используемыми для смягчения ионосферного эффекта первого порядка. Псевдодальность и свободная от ионосферы фаза несущей формируются в следующих уравнениях [7, 10, 11]:
 , (7)
, (7)
 , (8)
, (8)
где Nif – целочисленная неопределенность фазы без ионосферы, в циклах; λLi длина волны без задержки ионосферы, в метрах [12–14].
Основным преимуществом безыоносферных комбинаций является исключение членов, учитывающих влияние ионосферы. Недостатком безыоносферных линейных комбинаций является шум наблюдения, примерно в три раза превышающий шум на каждой из частот L1 или L2 [10].
Используя различные вариации метода наименьших квадратов, выполняют обработку измерений, постоянно дополняющихся информацией.
Результаты исследования и их обсуждение
Изменение длительности сеанса коррелирует с точностью обработанных координат. Длительные наблюдения увеличивают вероятность разрешения неоднозначности и уменьшения влияния многолучевости распространения сигнала. В табл. 1 показана зависимость между продолжительностью сеанса наблюдений и точностью получаемых координат.
Таблица 1
Связь продолжительности наблюдения и точности измерения статического PPP
|
Продолжительность наблюдения, мин |
Точность статического PPP с использованием смешанных наблюдений GPS/ГЛОНАСС, с вероятностью 95 % |
||||
|
y, (м) |
x, (м) |
h, (м) |
В плане, (м) |
Общая, (м) |
|
|
10 |
0,629 |
0,843 |
1,283 |
1,052 |
1,659 |
|
20 |
0,256 |
0,322 |
0,475 |
0,411 |
0,628 |
|
30 |
0,146 |
0,171 |
0,275 |
0,225 |
0,355 |
|
45 |
0,088 |
0,092 |
0,168 |
0,127 |
0,211 |
|
60 |
0,064 |
0,060 |
0,131 |
0,088 |
0,158 |
|
90 |
0,040 |
0,037 |
0,093 |
0,054 |
0,108 |
|
120 |
0,024 |
0,028 |
0,065 |
0,037 |
0,075 |
|
150 |
0,016 |
0,021 |
0,051 |
0,026 |
0,057 |
|
180 |
0,011 |
0,018 |
0,042 |
0,021 |
0,047 |
|
240 |
0,008 |
0,013 |
0,029 |
0,015 |
0,033 |
|
360 |
0,005 |
0,010 |
0,020 |
0,011 |
0,023 |
|
480 |
0,004 |
0,008 |
0,015 |
0,009 |
0,017 |
|
600 |
0,003 |
0,006 |
0,013 |
0,006 |
0,014 |
|
720 |
0,002 |
0,005 |
0,011 |
0,005 |
0,012 |
Источник: составлено авторами на основе полученных данных в ходе исследования.
Таблица 2
Географические координаты станций для решения PPP
|
Станция |
Широта (DMS) |
СКП, (м) |
Долгота (DMS) |
СКП, (м) |
Геодезическая высота (m) |
СКП, (м) |
|
BUCU (Румыния) |
44 27 50.20906 |
0,006 |
26 07 32.68616 |
0,007 |
143.242 |
0,013 |
|
DYNG (Греция) |
38 04 42.78692 |
0,006 |
23 55 56.76703 |
0,006 |
510.567 |
0,012 |
|
GANP (Словакия) |
49 02 04.97705 |
0,008 |
20 19 22.58736 |
0,009 |
746.034 |
0,021 |
|
GLSV (Украина) |
50 21 51.06579 |
0,006 |
30 29 48.25773 |
0,006 |
226.320 |
0,013 |
|
GRAZ (Австрия) |
47 04 01.67750 |
0,006 |
15 29 36.54842 |
0,006 |
538.284 |
0,012 |
|
JOZ2 (Польша) |
52 05 52.21776 |
0,005 |
21 01 56.48478 |
0,006 |
152.517 |
0,012 |
|
MAT1 (Италия) |
40 38 56.63516 |
0,008 |
16 42 16.38534 |
0,008 |
534.522 |
0,018 |
|
MEDI (Италия) |
44 31 11.85708 |
0,006 |
11 38 48.55243 |
0,007 |
49.991 |
0,013 |
|
POLV (Украина) |
49 36 09.41773 |
0,005 |
34 32 34.57052 |
0,007 |
178.337 |
0,013 |
|
SOFI (Болгария) |
42 33 21.94803 |
0,008 |
23 23 41.05681 |
0,011 |
1119.502 |
0,016 |
|
ZECK (Россия) |
43 47 18.22120 |
0,006 |
41 33 54.25995 |
0,007 |
1166.296 |
0,013 |
Источник: составлено авторами на основе полученных данных в ходе исследования.
Таблица 3
Точность геодезических сетей в Ливане
|
Класс |
Назначение |
Точность в плане, мм |
Точность по высоте, мм |
|
Первый класс |
Национальная опорная основа |
5 |
10 |
|
Второй класс |
Региональный контроль и сгущение сети |
10 |
15 |
|
Третий класс |
Обеспечение картографирования |
25 |
30 |
|
Четвертый класс |
Для обеспечения инженерных и кадастровых работ |
50 |
60 |
Источник: составлено авторами на основе полученных данных в ходе исследования.
В табл. 2 показаны данные постоянно действующих станций IGS (https://network.igs.org/), которые использовались для получения решения PPP.
В Ливане геодезическая сеть подразделяется на четыре основных класса по точности, как показано в табл. 3.
Выводы
При проектировании геодезической сети необходимо определить требуемый уровень точности, чтобы выбрать наилучший метод PPP для достижения необходимой точности пунктов создаваемой сети CORS.
Исследование показало:
1. Применение метода PPP позволяет добиться точности второго класса, с последующим уравниванием.
2. Используемые для реализации метода PPP станции IGS находятся на значительном удалении и поэтому не позволяют достичь точности геодезической сети первого класса, этот метод можно использовать для создания пунктов геодезической сети второго, третьего и четвертого классов.
На основании полученных данных сформулированы следующие рекомендации по применению станций CORS в Ливане:
− обеспечить равномерное покрытие территории страны станциями CORS;
− методика модернизации геодезической сети первого класса может использовать данные определенные пункты только как предварительные с последующим уравниванием для достижения необходимой точности;
− уравненную сеть первого класса использовать как основу для создания сетей младших классов, уменьшая, таким образом, расстояние до базовых станций при применении метода PPP;
− создать свой сервер по определению поправок для обслуживания потребителей, использующих «быстрый» метод PPP.
Конфликт интересов
Библиографическая ссылка
Акл М.Н., Половнев О.В., Насереддин Х.Х. ПРИМЕНЕНИЕ МЕТОДА ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ НА НЕПРЕРЫВНО ДЕЙСТВУЮЩИХ ОПОРНЫХ СТАНЦИЯХ GNSS В РЕСПУБЛИКЕ ЛИВАН // Успехи современного естествознания. 2025. № 7. С. 57-62;URL: https://natural-sciences.ru/ru/article/view?id=38412 (дата обращения: 19.07.2026).
DOI: https://doi.org/10.17513/use.38412