



Введение
На сегодняшний день урбанизированные территории характеризуются высокой плотностью застройки, многоуровневой организацией пространства, активным использованием подземных и надземных сооружений. В таких условиях традиционный двумерный кадастр не обеспечивает полного и достоверного учета объектов, что приводит к ошибкам при регистрации прав, налогообложении и управлении имущественным комплексом. Решением данной проблемы является переход к трехмерному (3D) кадастру, где объекты недвижимости будут представлены в виде трехмерных моделей. Пространственные данные для создания трехмерных моделей будут получены на основе применения современных геодезических методов, включая спутниковые технологии, наземное и воздушное лазерное сканирование, фотограмметрические методы и геоинформационные системы.
При этом одной из главных задач становится разработка методик геодезического обеспечения 3D-кадастра, обеспечивающих требуемую точность съемки и определение объемно-площадных характеристик объектов недвижимости. Проблема особенно актуальна для городов, где высока стоимость земель и объектов капитального строительства и ошибки пространственных данных приводят к негативным экономическим и социальным последствиям.
Вопросы применения наземного лазерного сканирования (далее – НЛС) для кадастровых и геодезических задач активно рассматриваются в научных исследованиях последних десятилетий. Анализ российской и зарубежной литературы последних лет показал, что НЛС обеспечивает сплошной сбор геометрических характеристик зданий и сооружений с точностью до 0,1 м и с высокой производительностью, что делает актуальной технологию для получения 3D-моделей объектов недвижимости и внедрения 3D-кадастра [1–3].
В работах М.Я. Брыня [4; 5] была рассмотрена необходимость повышения точности исходной геодезической основы и рационального проектирования геодезических ходов и сетей. Вопросы содержания геодезического обеспечения также были рассмотрены в работах В.В. Ознамца [6; 7]. Полученные авторами выводы, хотя и не ориентированы исключительно на применение НЛС, являются актуальными для регистрации облаков точек НЛС и трансформации 3D-моделей в кадастровые системы координат.
В работах Е.И. Аврунева [8; 9] и в монографии [10, с. 45–52] были рассмотрены вопросы геоинформационного сопровождения кадастровых работ. Автором было показано, что применение наземного лазерного сканирования позволяет формировать высокоточные трехмерные модели зданий, необходимые для постановки на кадастровый учет в условиях плотной городской застройки.
В исследованиях А.В. Чернова [11–13] было акцентировано внимание на алгоритмах регистрации и объединения облаков точек. Показано, что качество стыковки сканов является определяющим фактором при получении реалистичной 3D-модели объекта недвижимости.
В международной практике применение лазерного сканирования для геодезического обеспечения кадастра регламентируется стандартами ISO 19152 (Land Administration Domain Model – LADM) и инициативой INSPIRE Европейского Союза [14; 15]. Эти документы закладывают концептуальные основы для перехода от 2D-кадастра к полному 3Dпредставлению объектов недвижимости.
В России нормативная база пока не полностью учитывает возможности НЛС для создания 3D-моделей для целей кадастра. Федеральный закон № 218-ФЗ «О государственной регистрации недвижимости» [16] закрепляет необходимость точного определения границ объектов для двумерного кадастра, однако методики 3D-учета находятся на стадии апробации. ГОСТ Р 70689-2023 [17] регламентирует применение лазерного сканирования в инженерных изысканиях, что может служить основой для формирования нормативно-правовых актов в сфере 3D-кадастрового учета. Однако требуются углубление и детализация технического регулирования в области лазерного сканирования, поскольку существующие документы долгое время не охватывали все аспекты применения наземных и воздушных систем [18].
Цель исследования – обоснование требований к точности и параметрам 3D-кадастровой съемки на городских территориях с использованием наземного лазерного сканирования.
Материалы и методы исследования
Точность НЛС определяется несколькими составляющими: точностью измерения дальности σR и угловой точностью сканера σθ, σφ.
Была рассмотрена теоретическая модель погрешностей НЛС для 3D-кадастра.
В сферической системе координат сканера измеряются дальность R, горизонтальный угол θ и угол наклона φ. Пусть их средние квадратические ошибки (далее – СКО): σR, σθ, σφ. Декартовы координаты точки в системе координат сканера [19]:
 ,
,
 ,
,
 .
.
Было принято, что результаты измерений независимы, в связи с чем ковариационная матрица Kx,y,z координат была определена следующим образом:
 ,
,
где  ,
,
 .
.
В развернутом виде (для малых σθ, σφ в радианах) были получены
 ,
,
 ,
,
 .
.
Тем самым ошибки измерения горизонтальных углов возрастают пропорционально Rσθ, радиальная – σR, вертикальная – Rσφ. Типичные величины составляют σR ~ 1–3 мм, σθ, σφ ~ 10–60ʺ. При R = 30 м вклад угловых ошибок дает ≈1,5–9 мм в плане/по высоте, что сопоставимо с σR [15].
Для углового шага сканирования Δθ и Δφ шаг между соседними лучами на расстоянии R:
sθ = RΔθ, sφ = RΔφ
а средняя точечная плотность p на фронтальной поверхности составит
Эта зависимость определяет минимально допустимые Δθ, Δφ для обеспечения, например, двукратной избыточности точек на характерных линиях/кромках фасада заданной толщины [20].
Пусть требуется минимальная дискретизация деталей δ (например, кромка наличника шириной 0,02 м) с двукратной избыточностью точек (по критерию Найквиста для детектирования/обобщения). Тогда

Например, при R = 25 м и δ = 0,002 м, и получаем Δθ, Δφ ≤ 0,0004 рад ≈ 0,023º. Это соответствует «средне-плотным» нормативным значениям многих НЛС [21, с. 120–135].
Величина σplane – это среднеквадратическая ошибка ортогональных отклонений точек от аппроксимирующей плоскости, то есть она показывает, насколько «ровно» облако точек ложится на плоскость. На практике σplane служит операционным показателем для нормирования результатов НЛС на фасадах и внутренних стенах [22].
Для плоскости, аппроксимируемой методом наименьших квадратов по n точкам, СКО:
Здесь di – ортогональное расстояние от i-й точки до плоскости, n – количество точек в облаке, 3 – число оцениваемых параметров плоскости, по методу наименьших квадратов.
Регистрация (сшивка) двух или более облаков точек приводит к дополнительным ошибкам трансформации (поворот r и сдвиг t). Любые ошибки в оценке параметров трансформации дает систематическое смещение всех точек локального облака.
Модель жесткого преобразования точки p(x,y,z):
 ,
,
где t – вектор сдвига, r – ортогональная матрица поворота.
Для анализа ошибок удобно перейти к малым приращениям параметров трансформирования (малые углы поворота). Пусть параметры трансформирования представлены вектором:
 ,
,
где ω = (ωx, ωy, ωz) – малые углы поворота.
При малых углах:
 .
.
Малое приращение параметров δq дает малое приращение координат точки δpʹ:
 ,
,
где Jp – якобиан для точки p(x,y,z)Т:
 .
.
Пусть ковариационная матрица параметров трансформации равна Kq, тогда вклад погрешности трансформации в ковариацию координат отдельно взятой точки равен
Если исходная ковариация координат точки в локальной системе равна Kp, то итоговая ковариационная матрица преобразованной точки:
 .
.
Первое слагаемое, перенос шумов измерения самой точки, описывает перенос собственных погрешностей измерения точки (шум дальности и углов); второе, «глобальная» ошибка регистрации, отражает влияние неточности параметров трансформации (смещений и углов поворота), возникающих при регистрации облаков точек. Данная формула описывает, как меняется неопределенность координат точки при переходе из локальной системы сканера в общую систему координат после регистрации (сшивки) облака.
Опираясь на исследования в области трехмерного моделирования [23] и анализ точности НЛС, было предложено разделить показатели качества на три уровня: А – метрологические характеристики облака/регистрации, В – качество геометрических примитивов (плоскости, ребра, оси), С – качество пространственных данных объекта (контуры, модели помещений/этажей, объемы). Был выполнен предрасчет точности для показателей качества.
Показатель качества A (метрология облака/регистрации):
1. σplane для фасадов/помещений ≤ 0,003 – 0,005 м при R ≤ 30 м.
2. СКО регистрации координат точек между стоянками: ≤ 0,006 м.
3. Максимальный локальный перекос на длинных коридорах/фасадах: ≤ 0,01 м на 30 м (контролируется привязкой к опорной сети).
Показатель качества B (качество геометрических примитивов):
1. СКО положения плоскости стен/межквартирных перегородок: ≤ 0,005 м.
2. СКО положения кромок фасада после детектирования и обобщения: ≤ 0,01 м.
3. СКО положения характерных точек (углы, откосы, простенки): ≤ 0,01 м.
Показатель качества C (качество пространственных данных объекта):
1. Погрешность контура помещения ≤ 0,01 м.
2. Погрешность высотных отметок (например, уровни перекрытий, подоконники, парапеты) ≤ 0,002 м.
3. СКО объема 3D-модели, ≤ 2–3%.
Такие нормы обеспечивают требуемую точность для последующей регистрации прав и ограничений в 3D-кадастре [10–12]. Аналогичные выводы приведены в работе [13].
Интеграция НЛС в трехмерный кадастр была представлена в виде следующих процессов:
1. Получение пространственных данных для построения 3D-моделей с применением НЛС.
2. Формализация «пространственных характеристик» 3D-объектов (иерархия «здание – часть здания – помещение – технический объем»).
3. Хранение/отображение 3D-моделей в системе кадастра (НСПД) и их правовых характеристик.
Был рассмотрен пример расчета параметров НЛС для 3D-кадастровой съемки на урбанизированной территории. Объект – жилой дом, 9 этажей, длина фасада – 42 м, высота – 27 м, глубина двора – 18 м. Требуется создать 3D-модель фасадов и внутренних помещений первого этажа для целей трехмерного кадастрового учета. В рамках исследования было предложено использовать лазерный сканер средней точности (погрешность дальности σR = 0,002 м, угловая точность σθ = 60ʺ).
Фасад длиной 42 м и высотой 27 м покрывается при расстоянии сканирования R = 25 м. Чтобы обеспечить перекрытие не менее 40%, требуется не менее четырех стоянок на фасад (с базисом 12 м). Внутри двора достаточно трех стоянок на продольный ряд с перекрытием 30 %. Итого 7 стоянок для фасада и 4 для помещений, 11 стоянок. Схема размещения (рисунок) стоянок S1–S4 вдоль главного фасада через 12 м, S5–S7 во дворе, S8–S11 внутри помещений.
Минимальная деталь – толщина простенка/наличника δ = 0,0015 м. На расстоянии R = 25 м шаг между соседними лучами:
Критерий Найквиста:
 = 0,0003 рад = 0,017º
= 0,0003 рад = 0,017º
Был принят режим сканирования с угловым шагом 0,02º, что соответствует «среднеплотной» съемке.
Был рассмотрен случай, когда угол наклона φ = 0.
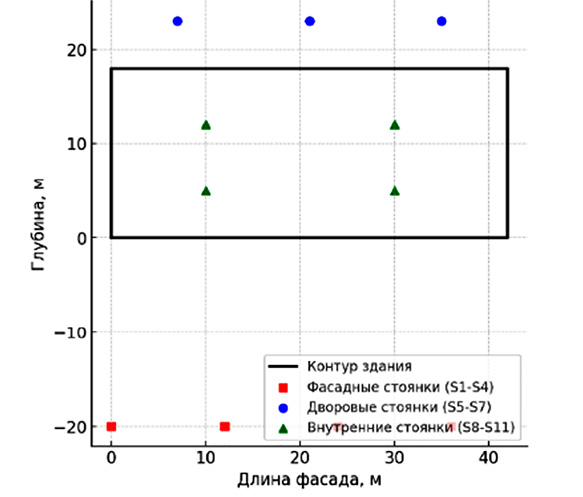
Схема размещения стоянок сканера для фасада, двора и помещений здания Примечание: составлен автором по результатам данного исследования
Оценка точности пространственных координат:
 ,
,
σx = 0,0021 м.
 ,
,
σy = 0,0021 м.
 ,
,
σz = 0,0021 м.
Таким образом, ожидаемая точность положения единичной точки – ≤ 0,003 м.
Для проверки качества после обработки выполнено следующее:
− Рассчитана σplane = 0,004 мм на шести участках фасада.
− Рассчитана СКО трансформации по пяти целям: 0,006 м.
− Выполнено сравнение результатов тахеометрической съемки на 12 контрольных точках по фасаду, среднее расхождение составило 0,007 м, максимальное – 0,009 м.
Таким образом, исходя из проведенного анализа и ранних выводах о необходимости повышения точности исходной геодезической основы урбанизированных территорий был предложен следующий регламент (для городских объектов при расстояниях до 30 м и приборах средней точности/высокоточных):
При планировании съемки НЛС для целей трехмерного кадастра было рекомендовано устанавливать следующие нормативные значения:
− Дальность R ≤ 0,03 м на фасадах;
R ≤ 20 м в помещениях.
− Угловой шаг Δθ = 0,02º, при наименьшей детали съемки 0,0015 м.
− Перекрытия между стоянками: ≥ 30% (в помещении) и ≥ 40% (фасады со сложной архитектурой).
Для контроля качества съемки, следующие нормативные значения:
− σplane ≤ 0,005 м на контрольных плоскостях.
− СКО регистрации трансформации между станциями ≤ 0,006 м.
− СКО положения точек ≤ 0,01 м.
При обработке полученных данных и подготовке модели объекта было рекомендовано выполнять топологическую проверку 3D-объектов (замкнутость, отсутствие самопересечений).
Результаты исследования и их обсуждение
Для обеспечения достоверности трехмерных кадастровых данных было предложено установить следующие предельные нормативные значения точности в зависимости от пространственного положения и функционального типа объекта недвижимости.
Таблица 1
Рекомендуемые значения средних квадратических ошибок координат конструктивных элементов объектов недвижимости
|
Категория объекта |
Средняя квадратическая ошибка планового положения, м |
Средняя квадратическая ошибка высотного положения, м |
|
Здания и сооружения (надземная часть) |
≤ 0,03 |
≤ 0,02 |
|
Подземные сооружения, тоннели, подвалы |
≤ 0,05 |
≤ 0,03 |
|
Помещения и этажные контуры |
≤ 0,02 |
≤ 0,01 |
|
Архитектурные элементы (балконы, козырьки и др.) |
≤ 0,05 |
≤ 0,05 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Таблица 2
Рекомендуемые параметры выполнения НЛС
|
Параметры |
Рекомендуемое значение |
|
Максимальная рабочая дальность сканирования |
≤ 30 м |
|
Угловое разрешение сканирования |
≤ 0,02° |
|
Точность измерения дальности (σ) |
≤ 0,003 м |
|
Средняя плотность облака точек на объекте |
≥ 1500 точек/м² |
|
Средняя погрешность регистрации (стыковки) облаков |
≤ 0,006 м |
|
Количество станций сканирования для одного здания |
не менее 6 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Данное разделение обусловлено особенностями геометрии объектов и их функциональной ролью в кадастре. Для объектов, характеризующихся сложной пространственной структурой, приоритетное значение приобретает точность высотного положения, поскольку даже незначительные ошибки по высоте (более 0,2–0,3 м) приводят к наложению трехмерных границ помещений и инженерных коммуникаций при формировании единого кадастрового слоя (табл. 1).
Для реализации вышеуказанных требований к точности было предложено устанавливать следующие параметры НЛС при проведении 3D-кадастровой съемки на урбанизированных территориях (табл. 2).
Заключение
Проведенные исследования позволили сформировать научно обоснованные требования к точности и параметрам выполнения 3D-кадастровой съемки на урбанизированных территориях. Обоснованы требования применения наземного лазерного сканирования с оптимизированными параметрами измерений и строгими критериями оценки достоверности пространственных данных.
По результатам эксперимента были сделаны выводы, что при дальности сканирования не более 30 м, угловом разрешении ≤ 0,02°, плотности облака точек ≥ 1500 точек/м² и средней квадратической ошибки регистрации не более 0,006 м достигается пространственная точность положения точек σx,y,z ≤ 0,021 м.
Были обоснованы количественные зависимости между параметрами съемки (дальностью, угловым шагом, плотностью точек) и точностью 3D-моделей.
Конфликт интересов
Финансирование
Библиографическая ссылка
Яковлева Н.Д. Обоснование требований к точности и параметрам 3D-кадастровой съёмки на городских территориях с использованием наземного лазерного сканирования // Успехи современного естествознания. 2026. № 1. С. 51-57;URL: https://natural-sciences.ru/ru/article/view?id=38472 (дата обращения: 02.07.2026).
DOI: https://doi.org/10.17513/use.38472