



На рисунке 1 приведена кинематическая схема шестизвенного механизма, состоящего из ведущего звена 1 и четырехзвенной группы нулевой подвижности 2-3-4-5, кинематическое решение которой требует исследование движения особых точек группы, называемых точками Ассура.
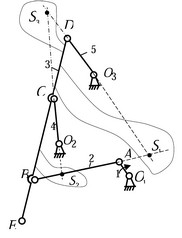
Рисунок 1 – Кинематическая схема шестизвенного плоского механизма с точками Ассура звена 3
Принципиальная особенность точек Ассура заключается в том, что они принадлежат трехповодковому звену группы, а именно звену 3. Лишь после определения скоростей и ускорений хотя бы одной из точек Ассура, может быть выполнено полное исследование кинематики механизма.
Точки Ассура в рассматриваемом механизме появляются на пересечении линий поводков 5-2 (S1),2-4(S2) и 4-5(S3) группы.
При известной скорости точки А кривошипа, скорости точек Ассура S1, S2, S3 могут быть найдены из систем уравнений
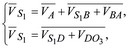
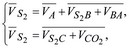
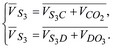
Единой чертой сверху обозначены вектора, имеющие одинаковые направления.
Используя приведенные системы уравнений можно найти на планах скоростей скорости всех трех точек S, как показано на рисунке 2
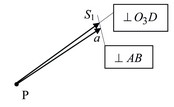
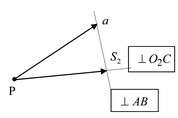
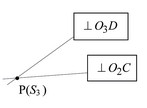
Рисунок 2 – Нахождение скоростей точек Ассура S1, S2, S3.
По известным скоростям точек Ассура становиться возможным найти скорость одной из точек трехпарного звена 3, а именно по  -
-  , по
, по  -
-  , по
, по  -
- 

Далее легко находятся скорости других точек трехпарного звена 3.
Из трех приведенных решений наиболее предпочтительнее является использование точки Ассура S3, скорость которой оказывается равной нулю.
Полный план скоростей механизма, построенный через точку S3 показан на рисунке 3.
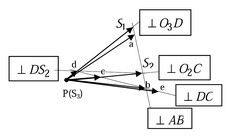
Рисунок 3 – Полный план скоростей механизма
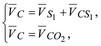
При этом по известной скорости точки В скорости точек C и D были найдены из уравнений

Скорость точки С на плане найдена из пропорции

Научный руководитель: Дворников Л.Т., д.т.н., профессор