



При создании робототехнических систем широкое применение получили так называемые замкнутые кинематические цепи, одно из звеньев которых используется в качестве схвата [1].
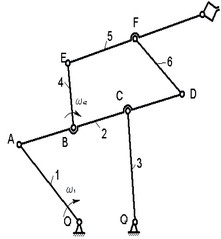
Рис. 1 – Кинематическая схема механизма
На рис. 1 представлена кинематическая схема двухуровневого замкнутого манипулятора. Его особенностью является то, что схват приводится в движение от двух приводов, обозначенных угловыми скоростями ω1 и ω42.
Исследуем механизм графоаналитическим методом, имея целью найти скорость выходной точки манипулятора G.
Скорость точки А определится уравнением:  , где VАО1 = ω1 · l АО1. Из полюса плана скоростей р (рис. 2) строим вектор скорости
, где VАО1 = ω1 · l АО1. Из полюса плана скоростей р (рис. 2) строим вектор скорости  ⊥ АО1.
⊥ АО1.
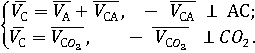
Скорость точки С определится из уравнений
Скорости точек В и D находятся из подобия:
 ,
,
где ab и ac есть вектора, определяющие скорости VAB и VAC соответственно,
 ;
;  ,
,
где ad есть вектор, определяющие скорости VAD,
 .
.
Скорость точки E и последующие точки F и G определятся двумя угловыми скоростями ω1 и ω42 ,
где VEB = ω42 · l EB.
На плане скоростей (рис. 2) из точки b строим вектор скорости  ⊥ ЕВ и направленный в сторону вращения звена.
⊥ ЕВ и направленный в сторону вращения звена.
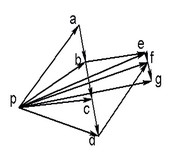
Рис. 2 – План скоростей
Скорость точки F определится из уравнений

Скорость точки G находится из подобия:

где eg и ef есть вектора, определяющие скорости VEG и VEF соответственно,
 .
.
Угловые скорости звеньев определяются зависимостями:
звено 2 
звено 3 
звено 4  ,
,
звено 5 
звено 6 
Научный руководитель: Дворников Л.Т., д.т.н., профессор