



Введение
В полевых условиях при выполнении измерений сложно определить ситуацию возникновения «опасного круга». В большинстве случаев наличие «опасного круга» выявляют в период камеральной обработки результатов измерений, что вызывает повторные полевые геодезические действия, а в конечном итоге влияет на себестоимость геодезических работ.
Цель исследования – быстрое определение положения определяемых пунктов на «опасном круге» при обратной геодезической засечке.
Материалы и методы исследования
Кафедрой геодезии Кубанского аграрного университета имени А. И. Трубилина проведены некоторые теоретические и практические исследования на предмет быстрого выявления «опасного круга» непосредственно в полевых условиях при выполнении измерений для определения координат геодезических пунктов обратной угловой засечкой. Кроме того, в результате исследования рассмотрен практический пример, которых нет в обозреваемых литературных источниках, подтверждающий утверждение, что если определяемая точка лежит на окружности, проходящей через три исходных пункта («опасный круг»), то задача становится неопределенной [1].
Результаты исследования и их обсуждение
В процессе проведения исследований на местности создана ситуация, при которой в первом случае исходные геодезические пункты и определяемый пункт Р0 находятся на одной окружности, а во втором определяемый Р находится внутри окружности [2].
Для этой цели на местности закреплены шесть точек геодезического обоснования т1, т2, т3, т4, т5, т6 и пункт Р0, по окружности по направлению радиусов от центра, что гарантировало размещение исходных и определяемого пункта на «опасном круге». Второй определяемый пункт Р расположен произвольно внутри данного круга. При этом местоположение исходных пунктов не менялось [3]. Схема размещения исходных и определяемых пунктов приведена на рис. 1.
Предварительно для сопоставления расчетов и анализа результатов экспериментальных измерений и произведено определение координат исходных и определяемых пунктов методом GPS-измерений с относительной погрешностью 1/10 000 каталог координат, которых представлен в табл. 1.
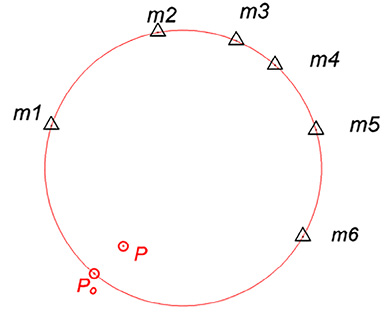
Рис. 1. Схема расположения исходных и определяемых пунктов на местности Примечание: составлен авторами по результатам данного исследования
Таблица 1
Каталог координат исходных и определяемых пунктов
|
Номер точки |
Координаты |
Координаты |
|
х |
х |
|
|
Исходные пункты |
||
|
т1 |
15366,97 |
16861,06 |
|
т2 |
15457,78 |
16964,98 |
|
т3 |
15449,54 |
17041,48 |
|
т4 |
15425,81 |
17079,16 |
|
т5 |
15362,38 |
17119,10 |
|
т6 |
15257,56 |
17106,32 |
|
Определяемые пункты |
||
|
Р0 |
15221,43 |
16902,78 |
|
Р |
15248,33 |
16931,07 |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Известно, что для решения обратной засечки с контролем необходимо выполнить измерения направлений не менее чем на четыре исходных пункта [4]. В процессе исследований измерения направлений выполнены способом круговых приемов с использованием электронного тахеометра Trimble C3 5" LP [5].
Для получения независимых результатов измерения направлений выполнены по двум вариантам. По первому варианту исходными пунктами являются т1, т2, т4, т6, по второму варианту – т1, т2, т3, т5. При этом местоположение определяемого пункта Р0 неизменно. По каждому из вариантов центрирование на пункте Р0 и начальное ориентирование выполнялось индивидуально, что позволяет исключить систематическую погрешность центрирования [6]. Схема измерения направлений (по двум вариантам) на пункте Р0 представлена на рис. 2.
Координаты исходных пунктов и результаты измерения направлений для определения координат пункта Р0, расположенного на «опасном круге», и по указанным выше вариантам приведены в табл. 2.
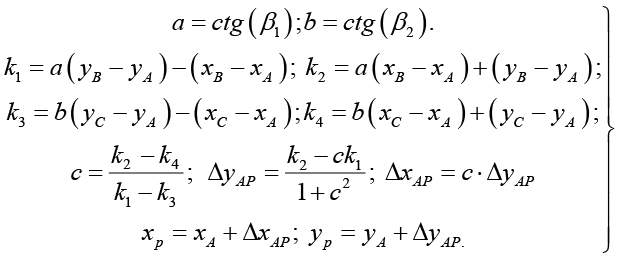
Вычисление координат дополнительного пункта Р0, а в дальнейшем и для пункта Р, выполнено решением обратной угловой засечки по формулам Кнейсселя, классическая схема которой представлена на рис. 3.
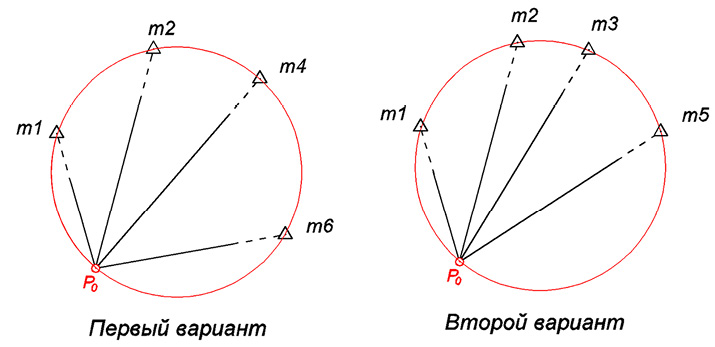
Рис. 2. Схема измерения направлений на пункте Р0 на «опасном круге» Примечание: составлен авторами на основе полученных данных в ходе исследования
Таблица 2
Исходные координаты и измеренные направления по вариантам
|
Номер точки |
Координаты |
Направления |
|||
|
х |
у |
град |
мин |
сек |
|
|
Первый вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
|
т2 |
15457,78 |
16964,98 |
30 |
44 |
22 |
|
т4 |
15425,81 |
17079,16 |
56 |
47 |
13 |
|
т6 |
15257,56 |
17106,32 |
95 |
55 |
43 |
|
Второй вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
|
т2 |
15457,78 |
16964,98 |
30 |
44 |
22 |
|
т3 |
15449,54 |
17041,48 |
47 |
17 |
42 |
|
т5 |
15362,38 |
17119,1 |
72 |
54 |
26 |
Примечание: составлена авторами на основе полученных данных в ходе исследования
 (1)
(1)
Рис. 3. Схема обратной угловой засечки по Кнейсселю Примечание: составлен авторами по результатам данного исследования
Ниже приведен пример первого решения по вычислению координат пункта Р0, в котором вместо обозначенных А, В, С в качестве исходных приняты координаты пунктов т1, т4, т6, а значения углов β1 и β2 равны измеренным направлениям на точки т4 и т6.
По аналогии выполнены еще три решения для первого и второго вариантов измерений, результаты которых приведены в табл. 3.
Следует заметить, что ранее определены истинные координаты точки Р0 (табл. 1), которые равны хРо = 15221,43, а уРо =16902,78.
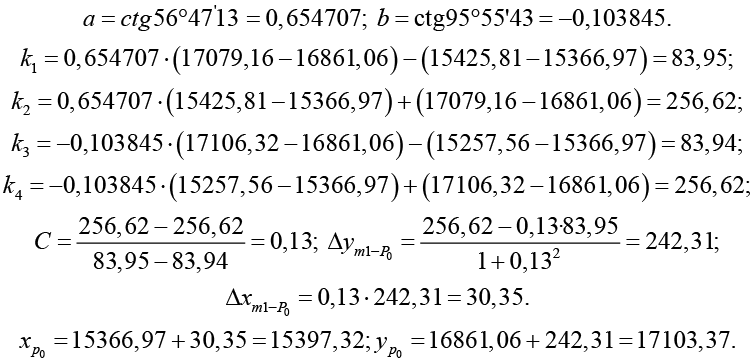
Таблица 3
Результаты вычислений координат пункта Р0
|
Номер решения |
Номер точки |
Координаты |
Направления |
Вычисленные координаты |
||||
|
х |
у |
х |
х |
сек |
||||
|
Первый вариант |
||||||||
|
1 |
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
15397,32 |
17103,37 |
|
т4 |
15425,81 |
17079,16 |
56 |
47 |
13 |
|||
|
т6 |
15257,56 |
17106,32 |
95 |
55 |
43 |
|||
|
2 |
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
15385,22 |
17110,20 |
|
т2 |
15457,78 |
16964,98 |
30 |
44 |
22 |
|||
|
т4 |
15425,81 |
17079,16 |
56 |
47 |
13 |
|||
|
Второй вариант |
||||||||
|
3 |
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
15307,86 |
17123,28 |
|
т3 |
15449,54 |
17041,48 |
47 |
17 |
42 |
|||
|
т5 |
15362,38 |
17119,1 |
72 |
54 |
26 |
|||
|
4 |
т1 |
15366,97 |
16861,06 |
0 |
00 |
00 |
15455,65 |
17023,38 |
|
т2 |
15457,78 |
16964,98 |
30 |
44 |
22 |
|||
|
т3 |
15449,54 |
17041,48 |
47 |
17 |
42 |
|||
Примечание: составлена авторами на основе полученных данных в ходе исследования
Как видно из результатов вычислений, получены различные значения координат и при этом ни одно из вычисленных значений не соответствует истинным координатам пункта Р0, что подтверждает классическое положение о том, что, если определяемые и исходные пункты располагаются на «опасном круге» при обратной засечке, результат вычислений дает неопределенное решение.
Для сравнения рассмотрен случай, при котором определяемая точка Р размещена вне окружности на которой расположены исходные пункты (рис. 4).
На пункте Р измерены направления по двум вариантам по неизменным исходным пунктам, как и для пункта Р0. Изменения только в местоположении определяемого пункта, который в данном случае смещен внутрь окружности на произвольное расстояние [7–9]. В табл. 4 приведены исходные координаты и измеренные направления для пункта Р, который гарантированно расположен вне «опасного круга».
По формулам (1) и схеме решения обратной засечки по Кнейсселю произведено четырехкратное вычисление координат пункта Р, результаты которого приведены в табл. 5.
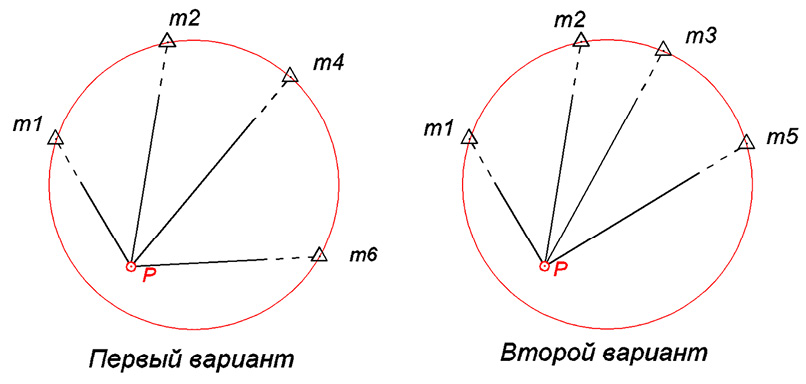
Рис. 4. Схема измерения направлений на точке Р вне «опасного круга» Примечание: составлен авторами на основе полученных данных в ходе исследования
Таблица 4
Каталог исходных координат и направлений на пункте Р
|
Номер точки |
Координаты |
Направления |
|||
|
х |
у |
х |
у |
||
|
Первый вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
|
т2 |
15457,78 |
16964,98 |
39 |
44 |
31 |
|
т4 |
15425,81 |
17079,16 |
70 |
23 |
04 |
|
т6 |
15257,56 |
17106,32 |
117 |
31 |
46 |
|
Второй вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
|
т2 |
15457,78 |
16964,98 |
39 |
44 |
31 |
|
т3 |
15449,54 |
17041,48 |
59 |
17 |
55 |
|
т5 |
15362,38 |
17119,1 |
89 |
18 |
22 |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Таблица 5
Результаты вычислений координат пункта Р
|
Номер решения |
Номер точки |
Координаты |
Направления |
Вычисленные координаты |
||||
|
х |
у |
град |
мин |
сек |
х |
у |
||
|
Первый вариант |
||||||||
|
1 |
т1 |
15366,97 |
16861,06 |
0 |
0 |
0 |
15248,31 |
16931,10 |
|
т4 |
15425,81 |
17079,16 |
70 |
23 |
04 |
|||
|
т6 |
15257,56 |
17106,32 |
117 |
31 |
46 |
|||
|
2 |
т1 |
15366,97 |
16861,06 |
0 |
00 |
00 |
15248,34 |
16931,06 |
|
т2 |
15457,78 |
16964,98 |
39 |
44 |
31 |
|||
|
т6 |
15257,56 |
17106,32 |
117 |
31 |
46 |
|||
|
Второй вариант |
||||||||
|
3 |
т1 |
15366,97 |
16861,06 |
0 |
00 |
00 |
15248,34 |
16931,04 |
|
т3 |
15449,54 |
17041,47 |
59 |
17 |
55 |
|||
|
т5 |
15362,38 |
17119,1 |
89 |
18 |
22 |
|||
|
4 |
т1 |
15366,97 |
16861,06 |
0 |
00 |
00 |
15248,33 |
16931,08 |
|
т2 |
15457,78 |
16964,98 |
39 |
44 |
31 |
|||
|
т3 |
15449,54 |
17041,48 |
59 |
17 |
55 |
|||
Примечание: составлена авторами на основе полученных данных в ходе исследования
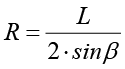
По результатам вычислений можно видеть, что вычисленные координаты определяемого пункта Р практически одинаковы и отличаются лишь на сотые доли метра [10]. При сопоставлении с ранее определенными координатами хР =15248,33, уР =16931,07 (табл. 1) максимальное расхождение в координатах составляет
rxP = xPвыч – хРист;

ryP = yPвыч – yРист;

Откуда абсолютное (линейное) расхождение:

Приведенные выше измерения и расчеты являются необходимой составляющей для обоснования предлагаемой методики решения вопроса быстрого определения наличия «опасного круга» при обратной засечке. Идея заключается в том, что обратную засечку, для случая наличия «опасного круга», можно представить как три вписанных треугольника, у которого все пять точек лежат на окружности (рис. 5).
Три хорды образованы четырьмя исходными пунктами, а вписанные углы, опирающиеся на хорды, образованы направлениями с определяемого пункта на исходные.
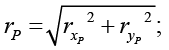
Из школьного курса геометрии, используя свойства хорды и опирающегося не нее вписанного угла, можно вычислить радиус окружности для каждого треугольника по формуле
 . (2)
. (2)
где L– длина хорды; β – вписанный угол, опирающийся на хорду.
Длины хорд можно вычислить решением обратных геодезических задач (ОГЗ) по координатам исходных пунктов, а значения опирающихся на них вписанных углов получают в результате полевых измерений [11].
Учитывая то, что все исходные и определяемая точка лежат н одной окружности (рис. 5) следует ожидать, что радиусы, вычисленные из каждого треугольника, должны быть одинаковы [12].
Для определения радиусов решением (ОГЗ) проведены вычисления значений длин хорд по координатам исходных пунктов для первого и второго вариантов измерений и вычислений (табл. 6).
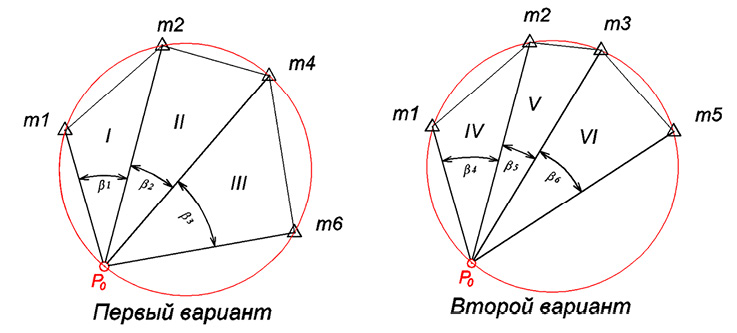
Рис. 5. Схемы обратных засечек как три вписанных треугольника по вариантам Примечание: составлен авторами по результатам данного исследования
Таблица 6
Вычисление длин хорд по вариантам
|
Номера пунктов |
Координаты |
Приращения координат |
Длина хорды |
||
|
х |
у |
Δх |
Δу |
||
|
Первый вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
|||
|
90,81 |
103,92 |
138,01 |
|||
|
т2 |
15457,78 |
16964,98 |
|||
|
-31,97 |
114,18 |
118,57 |
|||
|
т4 |
15425,81 |
17079,16 |
|||
|
-168,25 |
27,16 |
170,43 |
|||
|
т6 |
15257,56 |
17106,32 |
|||
|
Второй вариант |
|||||
|
т1 |
15366,97 |
16861,06 |
|||
|
90,81 |
103,92 |
138,01 |
|||
|
т2 |
15457,78 |
16964,98 |
|||
|
-8,24 |
76,5 |
76,94 |
|||
|
т3 |
15449,54 |
17041,48 |
|||
|
-87,16 |
77,62 |
116,71 |
|||
|
т5 |
15362,38 |
17119,1 |
|||
Примечание: составлена авторами на основе полученных данных в ходе исследования.
По результатам измерения направлений (табл. 2) вычислены вписанные углы для каждой хорды [13, 14]. Для наглядности и удобства вычислений значения хорд и вписанных углов по всем шести треугольникам сведены в табл. 7.
Ниже, в качестве примера, по формуле (2) приведен расчет радиуса для первого вписанного треугольника:

Аналогично выполнены расчеты для всех треугольников, результаты расчетов приведены в табл. 7.
Таблица 7
Вычисление радиусов для вписанных треугольников
|
Номер треугольника |
Хорда между пунктами |
Длина хорды L |
Вписанный угол β |
Вычисленный радиус |
|
Первый вариант |
||||
|
I |
т1-т2 |
138,01 |
30°44’22" |
135,00 |
|
II |
т2-т4 |
118,57 |
26°02’51" |
135,01 |
|
III |
т4-т6 |
170,43 |
39°08’30" |
135,00 |
|
Второй вариант |
||||
|
IV |
т1-т2 |
138,01 |
30°44’22" |
135,00 |
|
V |
т2-т3 |
76,94 |
16°33’20" |
135,01 |
|
VI |
т3-т5 |
116,71 |
25°36’44" |
134,99 |
Примечание: составлена авторами на основе полученных данных в ходе исследования
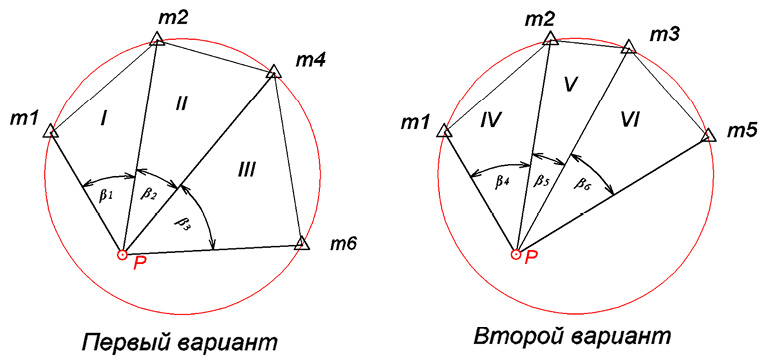
Рис. 6. Схема треугольников с точкой Р вне «опасного круга» Примечание: составлен авторами по результатам данного исследования
Таблица 8
Вычисление радиусов треугольников вне «опасного круга»
|
Номер треугольника |
Хорда между пунктами |
Длина хорды L |
Вписанный угол β |
Вычисленный радиус |
|
Первый вариант |
||||
|
I |
т1-т2 |
138,01 |
39°44’31" |
107,93 |
|
II |
т2-т4 |
118,57 |
30°38’33" |
115,75 |
|
III |
т4-т6 |
170,43 |
47°08’42" |
116,24 |
|
Второй вариант |
||||
|
IV |
т1-т2 |
138,01 |
39°44’31" |
107,93 |
|
V |
т2-т3 |
76,94 |
19°33’24" |
114,93 |
|
VI |
т3-т5 |
116,71 |
30°00’27" |
116,68 |
Примечание: составлена авторами на основе полученных данных в ходе исследования
Как видно из расчетов для любого вписанного треугольника, значения радиусов практически равны, значит, исходные пункты и определяемый Р0 лежат на одной окружности, поэтому определение координат обратной засечкой в таком случае невозможно.
Так как в период эксперимента выполнены измерения и вычисления координат пункта Р, в порядке сопоставления по аналогии произведен расчет радиусов для аналогичных треугольников для обратных засечек свободных от влияния «опасного круга». Схема треугольников для точки расположенной вне «опасного круга» представлена на рис. 6.
Следует заметить, что исходные пункты, как было сказано ранее, расположены на окружности и длины хорд между ними неизменно [15]. Изменяются только значения углов β1 – β6 значения, которых определены по измеренным направлениям, приведенным в табл. 4. Данные для расчетов и их результаты приведены в табл. 8.
Заключение
Как видно из результатов, значения вычисленных радиусов для всех треугольников не одинаковы, следовательно точка Р не лежит на одной окружности с исходными пунктами (на «опасном круге»).
Из всего изложенного выше можно сделать вывод, что для быстрого определения положения определяемых пунктов на «опасном круге» уже в полевых условиях следует:
– На определяемом пункте измерить углы или направления между тремя исходными пунктами;
– Решением обратной геодезической задачи определить расстояние (хорды) между исходными пунктами;
– По формуле (2) вычислить и сравнить полученные радиусы.
При равенстве радиусов имеет место быть наличие опасного круга.
Такую функцию можно ввести в программное обеспечение современных электронных тахеометров, что повысит их презентабельность.
Конфликт интересов
Финансирование
Библиографическая ссылка
Гурский И.Н., Шичиях З.З., Солодунов А.А., Пшидаток С.К. К ВОПРОСУ БЫСТРОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОПРЕДЕЛЯЕМЫХ ПУНКТОВ НА «ОПАСНОМ КРУГЕ» ПРИ ОБРАТНОЙ ГЕОДЕЗИЧЕСКОЙ ЗАСЕЧКЕ // Успехи современного естествознания. 2026. № 5. С. 102-110;URL: https://natural-sciences.ru/ru/article/view?id=38522 (дата обращения: 17.07.2026).
DOI: https://doi.org/10.17513/use.38522